I/O messages
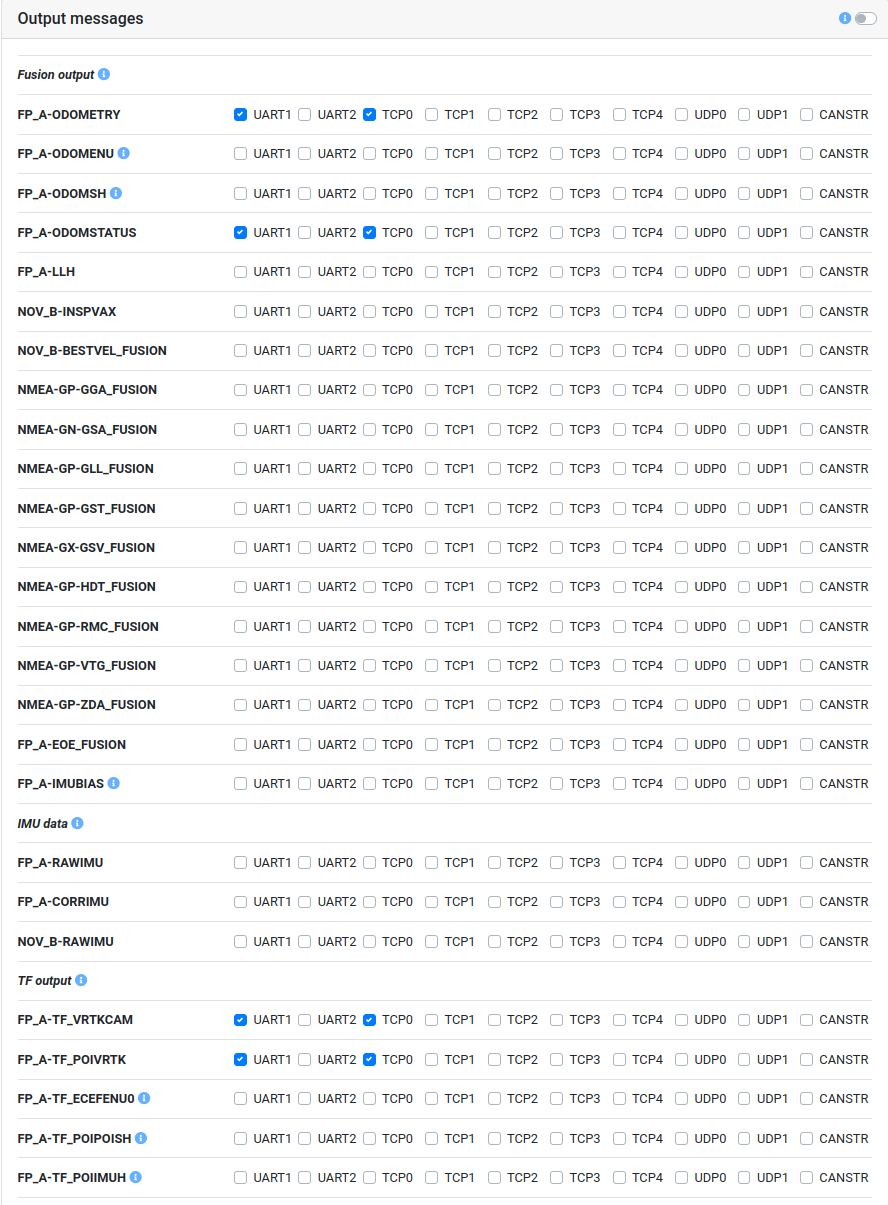
The user can select which messages are assigned to each port at the "Output messages"
module inside the "Configuration → I/O" panel, as shown in the following image:
The required output port bandwidth depends on the configuration. For example, on a serial port, the baud rate must be set high enough for the necessary bandwidth. The exact number depends on what messages are enabled for the port and the configured fusion output frequency.
Fusion output
The output frequency of these messages is the same as the Fusion output frequency configured in the output generator (See Section 5.5.7 of the Integration Manual for more information). By default, the output frequency is 10 Hz, but the user can configure it to the range of 1-100 Hz.
Available Fusion messages:
IMU output
All IMU output is generated at the IMU frequency of approximately 200 Hz. Note that the IMU output requires a lot of output bandwidth. For example, on a serial port, the baud rate must be set high enough for the necessary bandwidth. The exact number depends on what messages are enabled for the port.
Available IMU messages:
TF output
The output frequency of these messages is 1 Hz. See exceptions below.
Available TF messages:
∗ The output frequency of this message is the same as the configured Fusion frequency, see 5.4.5.
∗∗ The output frequency of this message is 200Hz.
Text output
Text output is an irregular output of text messages (strings). There are four levels:
ERROR – Errors. An error is something from which the sensor cannot recover or something that renders the sensor unusable in normal circumstances.
WARNING – Warnings. A warning is something from which the sensor could recover or something that does not render the sensor unusable in normal circumstances (i.e., the sensor operated to specifications). But it can, for example, hint at degraded performance.
INFO – General information.
DEBUG – Debug information valuable to the Fixposition team.
For example, the sensor outputs a "boot screen" on boot. While it does output it to any port where the FP_A-TEXT_INFO message is enabled, it is only practical to observe this output on UART and CANSTR ports. It is not possible to connect to the TCP ports in time to observe this output.
The boot screen is as follows:
$FP,TEXT,1,INFO,Fixposition AG - www.fixposition.com*09\r\n
$FP,TEXT,1,INFO,SW=fp_release_vr2_2.61.0_191*78\r\n
$FP,TEXT,1,INFO,HW=nav-vr2 1.2a 6d9d18*3E\r\nAvailable text messages:
GNSS output
All GNSS output is generated by default at the GNSS frequency of approximately 5 Hz. In addition, some GNSS output messages cannot be distinguished between GNSS receivers; ensure you use different ports to avoid confusion.
Available GNSS messages:
NMEA-GN-GGA_GNSS[average, 1, 2]
NMEA-GN-GLL_GNSS[average, 1, 2]
NMEA-GN-GSA_GNSS[average, 1, 2]
NMEA-GN-GST_GNSS[average, 1, 2]
NMEA-GX-GSV_GNSS[average, 1, 2]
NMEA-GN-RMC_GNSS[average, 1, 2]
NMEA-GN-VTG_GNSS[average, 1, 2]
NMEA-GN-ZDA_GNSS[average, 1, 2]
FP_A-EOE_GNSS[average, 1, 2]
Measurement input
Wheel odometry data can be transmitted through I/O using the UART, TCP, UDP, or CANSTR protocols, adhering to the FP_B-MEASUREMENTS format specified by Fixposition. Make sure to enable the respective port on the VRTK-2.
More information on feeding external measurements such as the wheel odometry: Setting up a wheel odometry input
Available measurement messages:
The input to a port must be guaranteed (by the user) to be message-by-message. That is, if multiple inputs to the same port are fed, such as inputting GNSS corrections and measurements, then the user must make sure that the messages are not interleaved on the byte level (which would corrupt the message frames).
It is recommended to use two ports independently if there are two desired inputs. For example, input corrections on one port (e.g. TCP0) and measurements on another port (e.g. TCP1).