FP_A-ODOMENU
This message is available from the firmware version 2.85.3.
Description:
This message contains full fusion ENU odometry output and additional status information. It is output at the configured rate.
By default, the ENU output is disabled even if the message is enabled on the I/O port. First, you must configure the ENU output reference frame in the 'Output generators' field of the Web Interface.
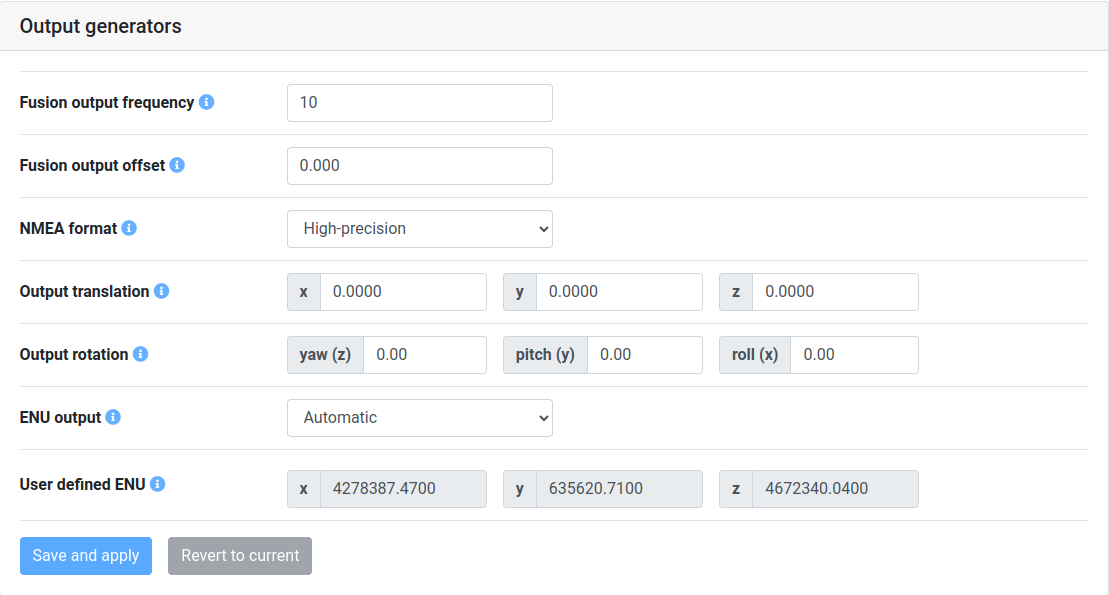
Here, the user can choose to automatically select the reference system (ENU0) as the first ECEF measurement received by the sensor:

Alternatively, the user can manually define the reference system in ECEF coordinates.

Example message:
$FP,ODOMENU,1,2180,298591.500000,-1.8339,2.6517,-0.0584,0.556794,-0.042551,-0.007850,0.829523,2.2993,
-1.6994,-0.0222,0.20063,0.08621,-1.21972,-3.6947,-3.3827,9.7482,4,1,8,8,1,0.00415,0.00946,0.00746,
-0.00149,-0.00084,0.00025,0.00003,0.00003,0.00012,0.00000,0.00000,0.00000,0.01742,0.01146,0.01612,
-0.00550,-0.00007,-0.00050*74\r\nMessage fields:
# | Field | Format | Unit | Example | Description |
|---|---|---|---|---|---|
1 |
| String | - |
| Message type, always |
2 |
| Numeric | - |
| Message version, always |
3 |
| Numeric | - |
| GPS week number, range 0–9999 |
4 |
| Float (.6) | s |
| GPS time of week, range 0.000–604799.999999 |
5 |
| Float (.4) | m |
| Position in ENU0, X component |
6 |
| Float (.4) | m |
| Position in ENU0, Y component |
7 |
| Float (.4) | m |
| Position in ENU0, Z component |
8 |
| Float (.6) | - |
| Quaternion with respect to ENU0, W component |
9 |
| Float (.6) | - |
| Quaternion with respect to ENU0, X component |
10 |
| Float (.6) | - |
| Quaternion with respect to ENU0, Y component |
11 |
| Float (.6) | - |
| Quaternion with respect to ENU0, Z component |
12 |
| Float (.4) | m/s |
| Velocity in output frame, X component |
13 |
| Float (.4) | m/s |
| Velocity in output frame, Y component |
14 |
| Float (.4) | m/s |
| Velocity in output frame, Z component |
15 |
| Float (.5) | rad/s |
| Bias corrected angular velocity in output frame, X component |
16 |
| Float (.5) | rad/s |
| Bias corrected angular velocity in output frame, Y component |
17 |
| Float (.5) | rad/s |
| Bias corrected angular velocity in output frame, Z component |
18 |
| Float (.4) | m/s2 |
| Bias corrected acceleration in output frame, X component |
19 |
| Float (.4) | m/s2 |
| Bias corrected acceleration in output frame, Y component |
20 |
| Float (.4) | m/s2 |
| Bias corrected acceleration in output frame, Z component |
21 |
| Numeric | - |
| Fustion status, see FP_A-ODOMETRY |
22 |
| Numeric | - |
| IMU bias status, see FP_A-ODOMETRY |
23 |
| Numeric | - |
| Fix status of GNSS1 receiver, see FP_A-ODOMETRY |
24 |
| Numeric | - |
| Fix status of GNSS2 receiver, see FP_A-ODOMETRY |
25 |
| Numeric | - |
| Wheelspeed status, see FP_A-ODOMETRY |
26 |
| Float (5) | m2 |
| Position covariance, element XX |
27 |
| Float (5) | m2 |
| Position covariance, element YY |
28 |
| Float (5) | m2 |
| Position covariance, element ZZ |
29 |
| Float (5) | m2 |
| Position covariance, element XY |
30 |
| Float (5) | m2 |
| Position covariance, element YZ |
31 |
| Float (5) | m2 |
| Position covariance, element XZ |
32 |
| Float (5) | rad2 |
| Orientation covariance, element XX |
33 |
| Float (5) | rad2 |
| Orientation covariance, element YY |
34 |
| Float (5) | rad2 |
| Orientation covariance, element ZZ |
35 |
| Float (5) | rad2 |
| Orientation covariance, element XY |
36 |
| Float (5) | rad2 |
| Orientation covariance, element YZ |
37 |
| Float (5) | rad2 |
| Orientation covariance, element XZ |
38 |
| Float (5) | m2/s2 |
| Velocity covariance, element XX |
39 |
| Float (5) | m2/s2 |
| Velocity covariance, element YY |
40 |
| Float (5) | m2/s2 |
| Velocity covariance, element ZZ |
41 |
| Float (5) | m2/s2 |
| Velocity covariance, element XY |
42 |
| Float (5) | m2/s2 |
| Velocity covariance, element YZ |
43 |
| Float (5) | m2/s2 |
| Velocity covariance, element XZ |
For the fusion status (fusion_status), IMU bias status (imu_bias_status), GNSS fix type (gnss1_fix, gnss2_fix) and wheelspeed status (wheelspeed_status) see the documentation of the FP_A-ODOMETRY message.