What is the position output when the sensor is tilted?
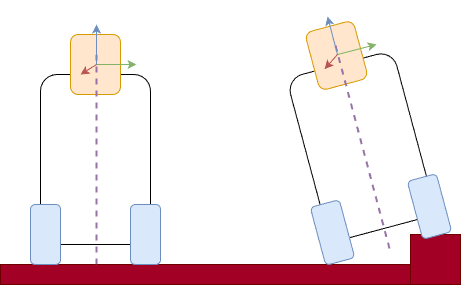
By default, the Vision-RTK2 estimates the position at the X mark on the enclosure; there is no projection to the ground. In this case, a tilt on the sensor would not change its position (assuming the axis of rotation crosses the Vision-RTK2), but it would change the estimated orientation. We output both position and orientation at all times.
If desired, the user can configure an output translation and rotation, which is applied after the position estimate is calculated on the sensor's reference frame. For example, you can configure a translation with the vehicle's height to estimate the sensor's position on the ground. In this case, when a rotation is applied, the output translation would apply a lever arm, changing the sensor's position output. In other words, the default position output would remain unchanged, but the output translation causes a lever arm that shifts the position output (see attached image).