How to generate a log of the Vision-RTK 2
Introduction
We use our custom data format '.fpl' for our internal recordings, allowing us to encrypt internal information selectively and provide ROS messages directly to the user. Alongside this file format, we provide tools to extract ROS bags and other data from it.
The recording can be performed at the following three locations (targets):
Internal disk built into the sensor
External disk connected to USB-C port. The minimum write speed must be 100 MB/s. This method is not recommended as it can degrade sensor performance.
Download the log file in real-time using standard HTTP over Ethernet. This is the preferred method but needs a stable and reliable Ethernet connection and a client (e.g., web browser, curl).
Recording via ‘Download’ is available since 2.85.3.
Although the external disk method supports USB sticks and HDD, we recommend using an SSD, as the writing speeds advertised in some of these commercial devices differ from the actual speeds, creating gaps in the recorded data stream.
There are four logging profiles ("levels"):
Maximal recording: Largest files, records all data. This contains all data, which we can use to fully reprocess the trajectory. The data rate is approx. 4.2 MiB/s.
Medium recording: Larger files, but does not record all data (for example, camera image is only recorded at 2 Hz). We can still do most of the reprocessing. The data rate is approx. 0.8 MiB/s.
Minimal recording: Smallest files, but only minimal data is recorded. Reprocessing is possible to some extent. The data rate is approx. 0.4 MiB/s.
Camera calibration: This records the data necessary for camera calibration.
Debug logs: System log used to identify issues when a recording is unavailable.
Some differences to the old recording (prior to 2.87.x):
The Minimal recording now includes the raw GNSS data.
The Medium recording now includes throttled camera images (~2 Hz).
Minimal, Medium, and Maximum now include the output messages, such as FP_A-ODOMETRY (all configured/enabled messages).
The recording now stops when the disk is full. There is no automatic rollover or rotation of older data.
There is now a (Linux command-line) utility for customers to extract a ROS data from the ‘.fpl’ file. See fpl2bag for more information.
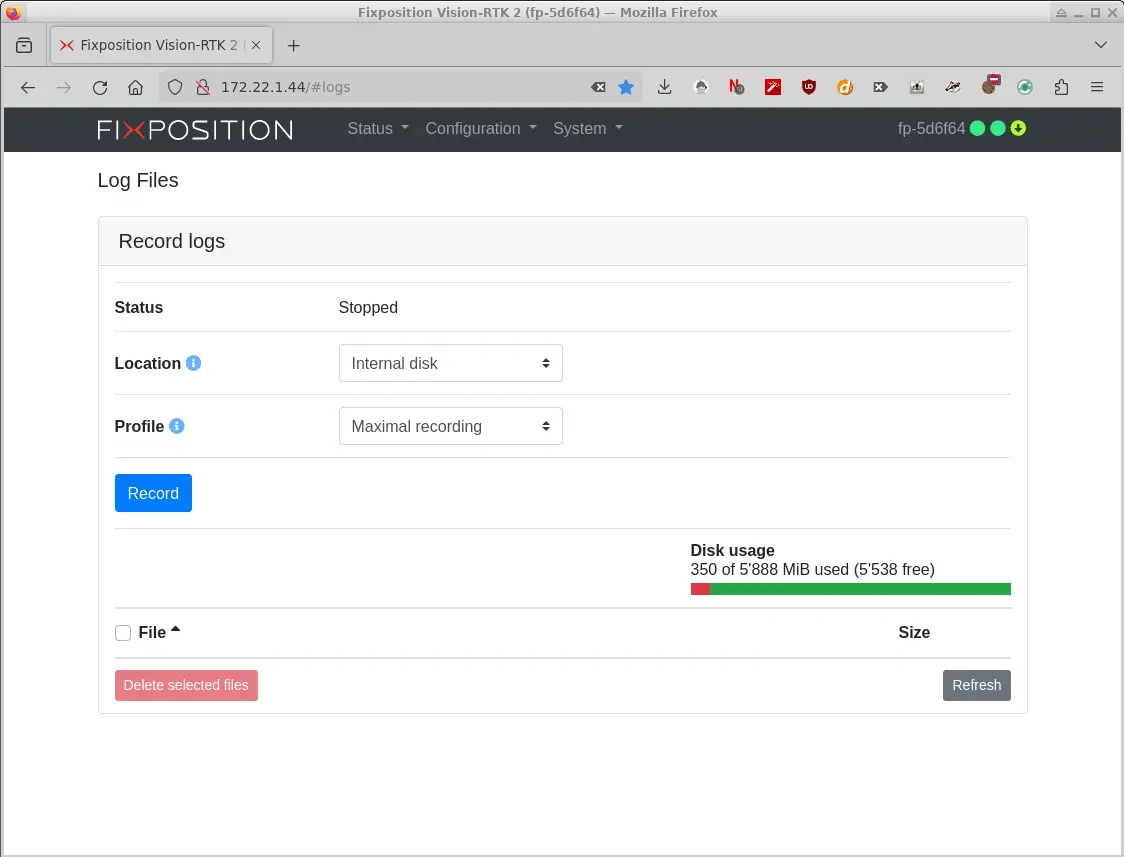
Log to disk
Recording to internal disk
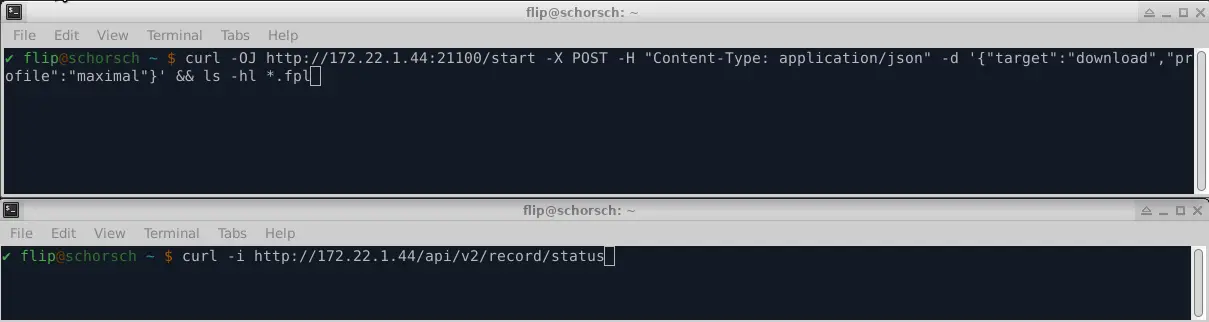
Log to network (download, command-line)
Network (download) using recording script (see record.py)
Network (download) recording CLI.
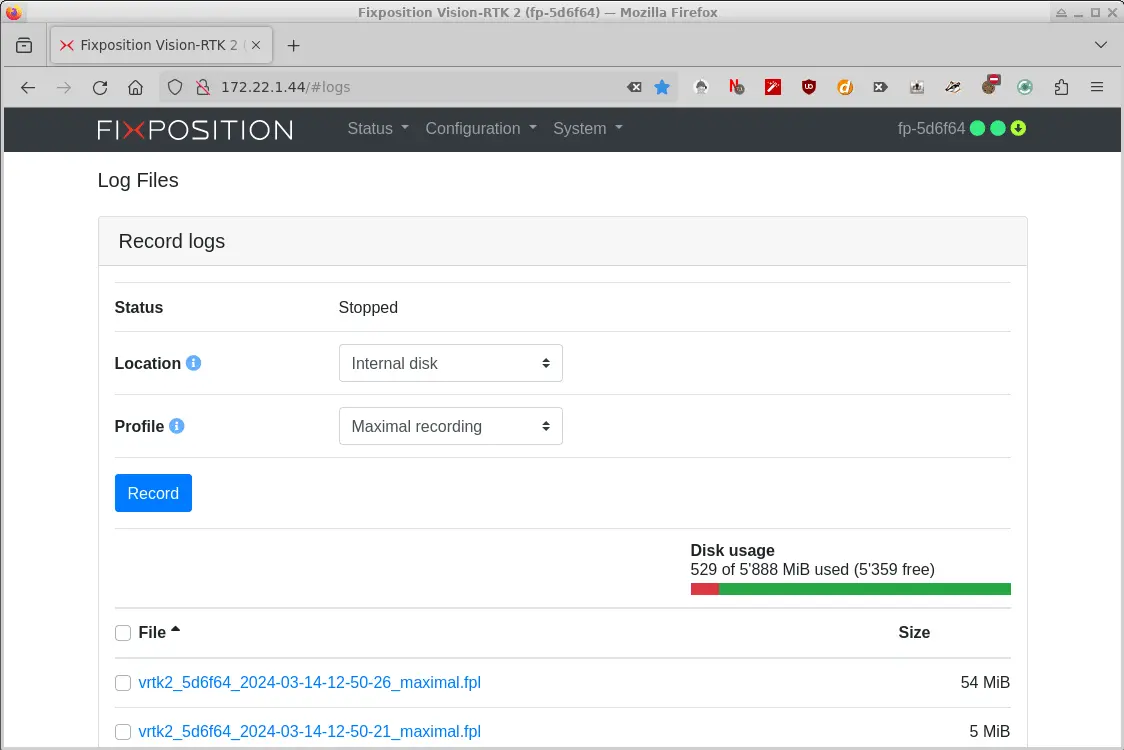
Log to network (download, using browser)
The success of this heavily depends on the browser, the operating system and their configuration.
Network (download) recording using web browser
Web interface alerts
There are a couple of alerts that can show:
Recording alerts
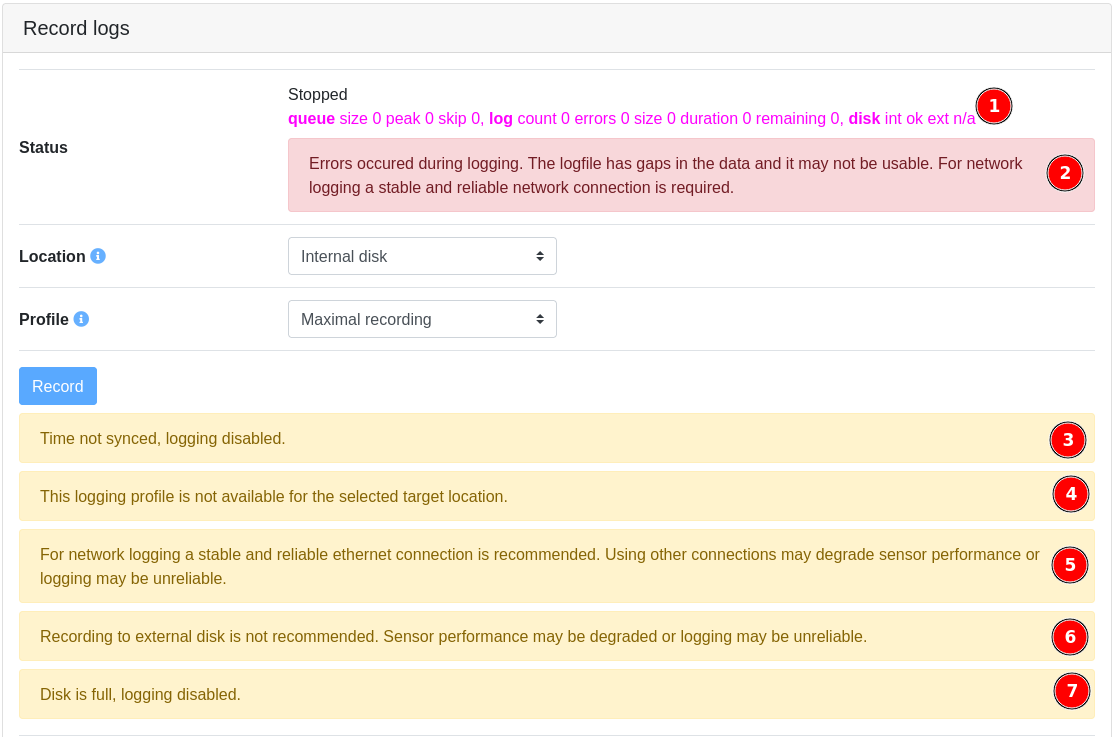
This is extra debugging information that can be enabled via Advanced Options.
This shows if there are any errors detected during logging.
This goes away once time is synced (compare display in System -> Info -> Time synchronization)
When logging location is network, some profiles may not be available on certain network connections.
This shows when network logging is selected but the user is not connected via Ethernet. While some profiles are allowed over Wi-Fi, it is clearly not recommended to do so.
This only shows when external disk is selected.
The selected disk is (too) full and active logging automatically stops and no further logging can be started until some disk space has been freed up.