Rostopic output rate accuracy
The output rate of the rostopics published by the Vision-RTK2 ROS driver is accurate. However, when looking at the recordings or plotting the received messages, the user might observe the following behavior:
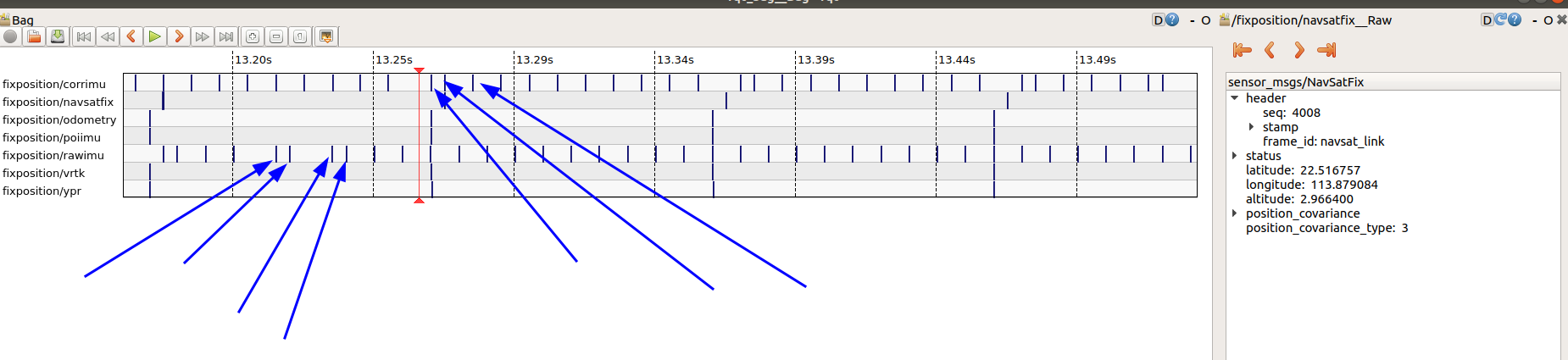
Rostopic rate
As observed in the figure, the rate of the output messages is not constant when looking at the time of arrival. However, this is the expected behavior of the sensor, as:
We are not a real-time system.
All the communications are not guaranteed to be real-time: ROS→TCP→Customer ROS→Bag recording. There are too many steps to then look at the time of arrival of the ROS messages.
The user should rely on the timestamp inside the message, and not on the time of arrival.