How to derive the vehicle speed from wheelspeed
Introduction
Multiple vehicle dynamic models are used to represent the motion of various types of vehicles. Fixposition offers two options for customers to input wheel speed data into the sensor accurately, optimizing fusion performance in near-ideal wheel scenarios (minimal slippage).
Option 1 - Configure the sensor’s web interface: Configure the “Configuration → Wheelspeed“ setting. Here, you can configure multiple wheel speeds, and the system will take a comprehensive approach to calculate vehicle speed based on
wheelspeed (speed of revolution or linear velocity of the wheel in the X-direction based on VRTK2 sensor frame)
heading angle
and extrinsic values
The sensor will directly estimate the heading with its GNSS-VIO fusion system without reading steering angle signals from the CAN directly. The default vehicle dynamic models supported are:
Balanced car model (lateral two-wheel model, e.g., two-wheel robot)
Bicycle model (longitudinal two-wheel model)
4WS (Four-wheel-distributed) vehicle model with front steering (e.g., four-wheel robot; SUV robot)
FWD (Front wheel drive) vehicle model with front steering (e.g., vehicle)
RWD (Rear wheel drive) vehicle model with front steering (e.g., vehicle)
In this option, you just need to focus on configuring the extrinsic between the VRTK2 and the wheelspeed sensor and data interface (TCP/UART/CAN) to stream in the signals of the wheelspeed sensor.
Right now, we focus on estimating velocity in the X-dimension temporarily.
Option 2 - Configure the Fixposition ROS driver (still need to configure the sensor’s web interface, but the data interface is TCP): Directly stream the vehicle speed in the X-directional instead of wheel speed into the Fixposition ROS driver; this velocity data will then be input into the VRTK2 sensor.
Recommend sending only component of velocity in the direction of movement rather than rear chassis wheel speed, which would help with the robustness of velocity estimation
Customers can calculate vehicle speed based on wheel speed and their dynamic models or use redundant sensor data resources to obtain vehicle speed and then project the values into X-axis, such as:
LiDAR data
millimeter-wave radar data
4D radar data
Optical ground speed sensor data
Reference:
TODO:
add some algorithm implementation reference here…
some paper reference here
Here are some common dynamic models, besides the ones mentioned above, that Fixposition customers may use to calculate vehicle speed:
RWD (Rear wheel drive) vehicle model with rear steering (e.g., large sweeper)
4WS (Four-wheel-distributed) vehicle model without a steering wheel (e.g., some robotic chassis)
Front-rear steering articulated vehicle (e.g., some tractors)
TOADD
Parameters, Basic Theory, Assumption
Vehicle speed is derived from longitudinal and lateral velocities. For different models, we will list the methods to calculate vehicle speed from wheel speed, wheel steering angle, and extrinsic parameters of the vehicle wheel with the mounted sensor.
Parameters
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : longitudinal velocity,
: longitudinal velocity,
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-3)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : longitudinal velocity,
: longitudinal velocity,
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-47)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1047' y='0'%3e%3c/use%3e %3cg transform='translate(2103%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-221A' x='0' y='16'%3e%3c/use%3e %3crect stroke='none' width='3781' height='60' x='1000' y='1107'%3e%3c/rect%3e %3cg transform='translate(1000%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-211'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='1501' y='0'%3e%3c/use%3e %3cg transform='translate(2502%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-212'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : vehicle velocity,
: vehicle velocity,
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) and
and ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : angular speeds of the left and right wheels,
: angular speeds of the left and right wheels,
' aria-hidden='true'%3e %3cuse xlink:href='%23E1-STIXWEBNORMALI-1D445' x='156' y='-50'%3e%3c/use%3e %3c/g%3e %3c/svg%3e) : the wheel radius,
: the wheel radius,
' aria-hidden='true'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='156' y='-50'%3e%3c/use%3e %3c/g%3e %3c/svg%3e) : the distance between the front wheels (track width).
: the distance between the front wheels (track width).
' aria-hidden='true'%3e %3cuse xlink:href='%23E1-STIXWEBNORMALI-1D43F' x='156' y='-50'%3e%3c/use%3e %3c/g%3e %3c/svg%3e) : the distance between the front and rear axles (wheelbase).
: the distance between the front and rear axles (wheelbase).
' aria-hidden='true'%3e %3cuse xlink:href='%23E1-STIXWEBNORMALI-1D6FF' x='156' y='-50'%3e%3c/use%3e %3c/g%3e %3c/svg%3e) : vehicle steering angle or heading angle,
: vehicle steering angle or heading angle,
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) and
and ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : the steering angles of the left and right wheels
: the steering angles of the left and right wheels
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) and
and ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : the steering angles of the front and rear axle if it is a four wheel steering system and both of their steering mechanism are based on the Ackermann steering geometry
: the steering angles of the front and rear axle if it is a four wheel steering system and both of their steering mechanism are based on the Ackermann steering geometry
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1448' y='0'%3e%3c/use%3e %3cg transform='translate(1894%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='3421' y='0'%3e%3c/use%3e %3cg transform='translate(3866%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='5374' y='0'%3e%3c/use%3e %3cg transform='translate(5819%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) : the steering angles of the front left, front right, rear left, rear right wheels respectively if it is a four wheel steering system
: the steering angles of the front left, front right, rear left, rear right wheels respectively if it is a four wheel steering system
Ackermann steering principle
Cars use the Ackermann steering principle. The idea behind the Ackermann steering is that the inner wheel (closer to ICR) should steer for a bigger angle than the outer wheel in order to allow the vehicle to rotate around the middle point between the rear wheel axis.
Keep in mind that the above two values are considered based on the Ackermann steering principle.
The overall steering angle based on the Ackermann steering principle depends on the steering angles of the front wheels and the distance between the front and rear axles. The Ackermann steering principle ensures that the inside and outside wheels follow different turning radii to minimize tire scrubbing and provide smoother turning.
To calculate the overall steering angle, you can use the following formula (First, people need to convert the steering angles from degrees to radians):
 %2b %5cfrac%7b%7bW%7d%7d%7b%7b2L%7d%7d %5ccdot %5ctan(%5cdelta_%7b%5ctext%7b%7bright%7d%7d%7d)%7d%7d%7b%7b1 %2b %5cfrac%7b%7bW%7d%7d%7b%7b2L%7d%7d %5ccdot %5ctan(%5cdelta_%7b%5ctext%7b%7bleft%7d%7d%7d) %5ccdot %5ctan(%5cdelta_%7b%5ctext%7b%7bright%7d%7d%7d)%7d%7d%5cright)%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-72' d='M36 46H50Q89 46 97 60V68Q97 77 97 91T98 122T98 161T98 203Q98 234 98 269T98 328L97 351Q94 370 83 376T38 385H20V408Q20 431 22 431L32 432Q42 433 60 434T96 436Q112 437 131 438T160 441T171 442H174V373Q213 441 271 441H277Q322 441 343 419T364 373Q364 352 351 337T313 322Q288 322 276 338T263 372Q263 381 265 388T270 400T273 405Q271 407 250 401Q234 393 226 386Q179 341 179 207V154Q179 141 179 127T179 101T180 81T180 66V61Q181 59 183 57T188 54T193 51T200 49T207 48T216 47T225 47T235 46T245 46H276V0H267Q249 3 140 3Q37 3 28 0H20V46H36Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-63' d='M370 305T349 305T313 320T297 358Q297 381 312 396Q317 401 317 402T307 404Q281 408 258 408Q209 408 178 376Q131 329 131 219Q131 137 162 90Q203 29 272 29Q313 29 338 55T374 117Q376 125 379 127T395 129H409Q415 123 415 120Q415 116 411 104T395 71T366 33T318 2T249 -11Q163 -11 99 53T34 214Q34 318 99 383T250 448T370 421T404 357Q404 334 387 320Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6C' d='M42 46H56Q95 46 103 60V68Q103 77 103 91T103 124T104 167T104 217T104 272T104 329Q104 366 104 407T104 482T104 542T103 586T103 603Q100 622 89 628T44 637H26V660Q26 683 28 683L38 684Q48 685 67 686T104 688Q121 689 141 690T171 693T182 694H185V379Q185 62 186 60Q190 52 198 49Q219 46 247 46H263V0H255L232 1Q209 2 183 2T145 3T107 3T57 1L34 0H26V46H42Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-65' d='M28 218Q28 273 48 318T98 391T163 433T229 448Q282 448 320 430T378 380T406 316T415 245Q415 238 408 231H126V216Q126 68 226 36Q246 30 270 30Q312 30 342 62Q359 79 369 104L379 128Q382 131 395 131H398Q415 131 415 121Q415 117 412 108Q393 53 349 21T250 -11Q155 -11 92 58T28 218ZM333 275Q322 403 238 411H236Q228 411 220 410T195 402T166 381T143 340T127 274V267H333V275Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-66' d='M273 0Q255 3 146 3Q43 3 34 0H26V46H42Q70 46 91 49Q99 52 103 60Q104 62 104 224V385H33V431H104V497L105 564L107 574Q126 639 171 668T266 704Q267 704 275 704T289 705Q330 702 351 679T372 627Q372 604 358 590T321 576T284 590T270 627Q270 647 288 667H284Q280 668 273 668Q245 668 223 647T189 592Q183 572 182 497V431H293V385H185V225Q185 63 186 61T189 57T194 54T199 51T206 49T213 48T222 47T231 47T241 46T251 46H282V0H273Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-67' d='M329 409Q373 453 429 453Q459 453 472 434T485 396Q485 382 476 371T449 360Q416 360 412 390Q410 404 415 411Q415 412 416 414V415Q388 412 363 393Q355 388 355 386Q355 385 359 381T368 369T379 351T388 325T392 292Q392 230 343 187T222 143Q172 143 123 171Q112 153 112 133Q112 98 138 81Q147 75 155 75T227 73Q311 72 335 67Q396 58 431 26Q470 -13 470 -72Q470 -139 392 -175Q332 -206 250 -206Q167 -206 107 -175Q29 -140 29 -75Q29 -39 50 -15T92 18L103 24Q67 55 67 108Q67 155 96 193Q52 237 52 292Q52 355 102 398T223 442Q274 442 318 416L329 409ZM299 343Q294 371 273 387T221 404Q192 404 171 388T145 343Q142 326 142 292Q142 248 149 227T179 192Q196 182 222 182Q244 182 260 189T283 207T294 227T299 242Q302 258 302 292T299 343ZM403 -75Q403 -50 389 -34T348 -11T299 -2T245 0H218Q151 0 138 -6Q118 -15 107 -34T95 -74Q95 -84 101 -97T122 -127T170 -155T250 -167Q319 -167 361 -139T403 -75Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-68' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 124T102 167T103 217T103 272T103 329Q103 366 103 407T103 482T102 542T102 586T102 603Q99 622 88 628T43 637H25V660Q25 683 27 683L37 684Q47 685 66 686T103 688Q120 689 140 690T170 693T181 694H184V367Q244 442 328 442Q451 442 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-31' d='M213 578L200 573Q186 568 160 563T102 556H83V602H102Q149 604 189 617T245 641T273 663Q275 666 285 666Q294 666 302 660V361L303 61Q310 54 315 52T339 48T401 46H427V0H416Q395 3 257 3Q121 3 100 0H88V46H114Q136 46 152 46T177 47T193 50T201 52T207 57T213 61V578Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-28' d='M758 -1237T758 -1240T752 -1249H736Q718 -1249 717 -1248Q711 -1245 672 -1199Q237 -706 237 251T672 1700Q697 1730 716 1749Q718 1750 735 1750H752Q758 1744 758 1741Q758 1737 740 1713T689 1644T619 1537T540 1380T463 1176Q348 802 348 251Q348 -242 441 -599T744 -1218Q758 -1237 758 -1240Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-29' d='M33 1741Q33 1750 51 1750H60H65Q73 1750 81 1743T119 1700Q554 1207 554 251Q554 -707 119 -1199Q76 -1250 66 -1250Q65 -1250 62 -1250T56 -1249Q55 -1249 53 -1249T49 -1250Q33 -1250 33 -1239Q33 -1236 50 -1214T98 -1150T163 -1052T238 -910T311 -727Q443 -335 443 251Q443 402 436 532T405 831T339 1142T224 1438T50 1716Q33 1737 33 1741Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='729' y='0'%3e%3c/use%3e %3cg transform='translate(1785%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-61'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-63' x='893' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-74' x='1337' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='1727' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='2227' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(4569%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ4-28'%3e%3c/use%3e %3cg transform='translate(792%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='9553' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(335%2c856)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='1446' y='0'%3e%3c/use%3e %3cg transform='translate(1298%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-6C' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-65' x='778' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-66' x='1223' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='1529' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='1919' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4345' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='4734' y='0'%3e%3c/use%3e %3cg transform='translate(3898%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='798' height='60' x='0' y='146'%3e%3c/rect%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-57' x='171' y='669'%3e%3c/use%3e %3cg transform='translate(60%2c-411)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6981' y='0'%3e%3c/use%3e %3cg transform='translate(5133%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='8706' y='0'%3e%3c/use%3e %3cg transform='translate(6432%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-69' x='893' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-67' x='1171' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-68' x='1672' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='2228' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='2618' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='12172' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(60%2c-722)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-31' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='500' y='0'%3e%3c/use%3e %3cg transform='translate(904%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='798' height='60' x='0' y='146'%3e%3c/rect%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-57' x='171' y='669'%3e%3c/use%3e %3cg transform='translate(60%2c-411)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='2747' y='0'%3e%3c/use%3e %3cg transform='translate(2139%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='4472' y='0'%3e%3c/use%3e %3cg transform='translate(3438%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-6C' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-65' x='778' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-66' x='1223' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='1529' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='1919' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='7371' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='7760' y='0'%3e%3c/use%3e %3cg transform='translate(5684%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='9485' y='0'%3e%3c/use%3e %3cg transform='translate(6982%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-69' x='893' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-67' x='1171' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-68' x='1672' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='2228' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='2618' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='12951' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ4-29' x='10586' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Two simplified versions:
 %2b %5cfrac%7b%7bW%7d%7d%7b%7b2%7d%7d %5ccdot %5ctan(%5cdelta_%7b%5ctext%7b%7bright%7d%7d%7d)%7d%7d%7b%7bW%7d%7d%5cright)%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-72' d='M36 46H50Q89 46 97 60V68Q97 77 97 91T98 122T98 161T98 203Q98 234 98 269T98 328L97 351Q94 370 83 376T38 385H20V408Q20 431 22 431L32 432Q42 433 60 434T96 436Q112 437 131 438T160 441T171 442H174V373Q213 441 271 441H277Q322 441 343 419T364 373Q364 352 351 337T313 322Q288 322 276 338T263 372Q263 381 265 388T270 400T273 405Q271 407 250 401Q234 393 226 386Q179 341 179 207V154Q179 141 179 127T179 101T180 81T180 66V61Q181 59 183 57T188 54T193 51T200 49T207 48T216 47T225 47T235 46T245 46H276V0H267Q249 3 140 3Q37 3 28 0H20V46H36Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-63' d='M370 305T349 305T313 320T297 358Q297 381 312 396Q317 401 317 402T307 404Q281 408 258 408Q209 408 178 376Q131 329 131 219Q131 137 162 90Q203 29 272 29Q313 29 338 55T374 117Q376 125 379 127T395 129H409Q415 123 415 120Q415 116 411 104T395 71T366 33T318 2T249 -11Q163 -11 99 53T34 214Q34 318 99 383T250 448T370 421T404 357Q404 334 387 320Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6C' d='M42 46H56Q95 46 103 60V68Q103 77 103 91T103 124T104 167T104 217T104 272T104 329Q104 366 104 407T104 482T104 542T103 586T103 603Q100 622 89 628T44 637H26V660Q26 683 28 683L38 684Q48 685 67 686T104 688Q121 689 141 690T171 693T182 694H185V379Q185 62 186 60Q190 52 198 49Q219 46 247 46H263V0H255L232 1Q209 2 183 2T145 3T107 3T57 1L34 0H26V46H42Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-65' d='M28 218Q28 273 48 318T98 391T163 433T229 448Q282 448 320 430T378 380T406 316T415 245Q415 238 408 231H126V216Q126 68 226 36Q246 30 270 30Q312 30 342 62Q359 79 369 104L379 128Q382 131 395 131H398Q415 131 415 121Q415 117 412 108Q393 53 349 21T250 -11Q155 -11 92 58T28 218ZM333 275Q322 403 238 411H236Q228 411 220 410T195 402T166 381T143 340T127 274V267H333V275Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-66' d='M273 0Q255 3 146 3Q43 3 34 0H26V46H42Q70 46 91 49Q99 52 103 60Q104 62 104 224V385H33V431H104V497L105 564L107 574Q126 639 171 668T266 704Q267 704 275 704T289 705Q330 702 351 679T372 627Q372 604 358 590T321 576T284 590T270 627Q270 647 288 667H284Q280 668 273 668Q245 668 223 647T189 592Q183 572 182 497V431H293V385H185V225Q185 63 186 61T189 57T194 54T199 51T206 49T213 48T222 47T231 47T241 46T251 46H282V0H273Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-67' d='M329 409Q373 453 429 453Q459 453 472 434T485 396Q485 382 476 371T449 360Q416 360 412 390Q410 404 415 411Q415 412 416 414V415Q388 412 363 393Q355 388 355 386Q355 385 359 381T368 369T379 351T388 325T392 292Q392 230 343 187T222 143Q172 143 123 171Q112 153 112 133Q112 98 138 81Q147 75 155 75T227 73Q311 72 335 67Q396 58 431 26Q470 -13 470 -72Q470 -139 392 -175Q332 -206 250 -206Q167 -206 107 -175Q29 -140 29 -75Q29 -39 50 -15T92 18L103 24Q67 55 67 108Q67 155 96 193Q52 237 52 292Q52 355 102 398T223 442Q274 442 318 416L329 409ZM299 343Q294 371 273 387T221 404Q192 404 171 388T145 343Q142 326 142 292Q142 248 149 227T179 192Q196 182 222 182Q244 182 260 189T283 207T294 227T299 242Q302 258 302 292T299 343ZM403 -75Q403 -50 389 -34T348 -11T299 -2T245 0H218Q151 0 138 -6Q118 -15 107 -34T95 -74Q95 -84 101 -97T122 -127T170 -155T250 -167Q319 -167 361 -139T403 -75Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-68' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 124T102 167T103 217T103 272T103 329Q103 366 103 407T103 482T102 542T102 586T102 603Q99 622 88 628T43 637H25V660Q25 683 27 683L37 684Q47 685 66 686T103 688Q120 689 140 690T170 693T181 694H184V367Q244 442 328 442Q451 442 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-28' d='M758 -1237T758 -1240T752 -1249H736Q718 -1249 717 -1248Q711 -1245 672 -1199Q237 -706 237 251T672 1700Q697 1730 716 1749Q718 1750 735 1750H752Q758 1744 758 1741Q758 1737 740 1713T689 1644T619 1537T540 1380T463 1176Q348 802 348 251Q348 -242 441 -599T744 -1218Q758 -1237 758 -1240Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ4-29' d='M33 1741Q33 1750 51 1750H60H65Q73 1750 81 1743T119 1700Q554 1207 554 251Q554 -707 119 -1199Q76 -1250 66 -1250Q65 -1250 62 -1250T56 -1249Q55 -1249 53 -1249T49 -1250Q33 -1250 33 -1239Q33 -1236 50 -1214T98 -1150T163 -1052T238 -910T311 -727Q443 -335 443 251Q443 402 436 532T405 831T339 1142T224 1438T50 1716Q33 1737 33 1741Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='729' y='0'%3e%3c/use%3e %3cg transform='translate(1785%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-61'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-63' x='893' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-74' x='1337' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='1727' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='2227' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(4569%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ4-28'%3e%3c/use%3e %3cg transform='translate(792%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='9605' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c845)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='681' y='0'%3e%3c/use%3e %3cg transform='translate(678%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='2406' y='0'%3e%3c/use%3e %3cg transform='translate(1977%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-6C' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-65' x='778' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-66' x='1223' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='1529' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='1919' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='5305' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='5694' y='0'%3e%3c/use%3e %3cg transform='translate(4577%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='721' height='60' x='0' y='146'%3e%3c/rect%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-57' x='104' y='669'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-32' x='378' y='-698'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='7833' y='0'%3e%3c/use%3e %3cg transform='translate(5736%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='9558' y='0'%3e%3c/use%3e %3cg transform='translate(7034%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-69' x='893' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-67' x='1171' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-68' x='1672' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='2228' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='2618' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='13024' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='6267' y='-606'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ4-29' x='10637' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) (1)
(1)
 %2b W %5ccdot %5ctan(%5cdelta_%7b%5ctext%7b%7bright%7d%7d%7d)%7d%7d%7b%7bW%7d%7d%5cright)%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-72' d='M36 46H50Q89 46 97 60V68Q97 77 97 91T98 122T98 161T98 203Q98 234 98 269T98 328L97 351Q94 370 83 376T38 385H20V408Q20 431 22 431L32 432Q42 433 60 434T96 436Q112 437 131 438T160 441T171 442H174V373Q213 441 271 441H277Q322 441 343 419T364 373Q364 352 351 337T313 322Q288 322 276 338T263 372Q263 381 265 388T270 400T273 405Q271 407 250 401Q234 393 226 386Q179 341 179 207V154Q179 141 179 127T179 101T180 81T180 66V61Q181 59 183 57T188 54T193 51T200 49T207 48T216 47T225 47T235 46T245 46H276V0H267Q249 3 140 3Q37 3 28 0H20V46H36Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-63' d='M370 305T349 305T313 320T297 358Q297 381 312 396Q317 401 317 402T307 404Q281 408 258 408Q209 408 178 376Q131 329 131 219Q131 137 162 90Q203 29 272 29Q313 29 338 55T374 117Q376 125 379 127T395 129H409Q415 123 415 120Q415 116 411 104T395 71T366 33T318 2T249 -11Q163 -11 99 53T34 214Q34 318 99 383T250 448T370 421T404 357Q404 334 387 320Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7B' d='M434 -231Q434 -244 428 -250H410Q281 -250 230 -184Q225 -177 222 -172T217 -161T213 -148T211 -133T210 -111T209 -84T209 -47T209 0Q209 21 209 53Q208 142 204 153Q203 154 203 155Q189 191 153 211T82 231Q71 231 68 234T65 250T68 266T82 269Q116 269 152 289T203 345Q208 356 208 377T209 529V579Q209 634 215 656T244 698Q270 724 324 740Q361 748 377 749Q379 749 390 749T408 750H428Q434 744 434 732Q434 719 431 716Q429 713 415 713Q362 710 332 689T296 647Q291 634 291 499V417Q291 370 288 353T271 314Q240 271 184 255L170 250L184 245Q202 239 220 230T262 196T290 137Q291 131 291 1Q291 -134 296 -147Q306 -174 339 -192T415 -213Q429 -213 431 -216Q434 -219 434 -231Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6C' d='M42 46H56Q95 46 103 60V68Q103 77 103 91T103 124T104 167T104 217T104 272T104 329Q104 366 104 407T104 482T104 542T103 586T103 603Q100 622 89 628T44 637H26V660Q26 683 28 683L38 684Q48 685 67 686T104 688Q121 689 141 690T171 693T182 694H185V379Q185 62 186 60Q190 52 198 49Q219 46 247 46H263V0H255L232 1Q209 2 183 2T145 3T107 3T57 1L34 0H26V46H42Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-65' d='M28 218Q28 273 48 318T98 391T163 433T229 448Q282 448 320 430T378 380T406 316T415 245Q415 238 408 231H126V216Q126 68 226 36Q246 30 270 30Q312 30 342 62Q359 79 369 104L379 128Q382 131 395 131H398Q415 131 415 121Q415 117 412 108Q393 53 349 21T250 -11Q155 -11 92 58T28 218ZM333 275Q322 403 238 411H236Q228 411 220 410T195 402T166 381T143 340T127 274V267H333V275Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-66' d='M273 0Q255 3 146 3Q43 3 34 0H26V46H42Q70 46 91 49Q99 52 103 60Q104 62 104 224V385H33V431H104V497L105 564L107 574Q126 639 171 668T266 704Q267 704 275 704T289 705Q330 702 351 679T372 627Q372 604 358 590T321 576T284 590T270 627Q270 647 288 667H284Q280 668 273 668Q245 668 223 647T189 592Q183 572 182 497V431H293V385H185V225Q185 63 186 61T189 57T194 54T199 51T206 49T213 48T222 47T231 47T241 46T251 46H282V0H273Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-7D' d='M65 731Q65 745 68 747T88 750Q171 750 216 725T279 670Q288 649 289 635T291 501Q292 362 293 357Q306 312 345 291T417 269Q428 269 431 266T434 250T431 234T417 231Q380 231 345 210T298 157Q293 143 292 121T291 -28V-79Q291 -134 285 -156T256 -198Q202 -250 89 -250Q71 -250 68 -247T65 -230Q65 -224 65 -223T66 -218T69 -214T77 -213Q91 -213 108 -210T146 -200T183 -177T207 -139Q208 -134 209 3L210 139Q223 196 280 230Q315 247 330 250Q305 257 280 270Q225 304 212 352L210 362L209 498Q208 635 207 640Q195 680 154 696T77 713Q68 713 67 716T65 731Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-67' d='M329 409Q373 453 429 453Q459 453 472 434T485 396Q485 382 476 371T449 360Q416 360 412 390Q410 404 415 411Q415 412 416 414V415Q388 412 363 393Q355 388 355 386Q355 385 359 381T368 369T379 351T388 325T392 292Q392 230 343 187T222 143Q172 143 123 171Q112 153 112 133Q112 98 138 81Q147 75 155 75T227 73Q311 72 335 67Q396 58 431 26Q470 -13 470 -72Q470 -139 392 -175Q332 -206 250 -206Q167 -206 107 -175Q29 -140 29 -75Q29 -39 50 -15T92 18L103 24Q67 55 67 108Q67 155 96 193Q52 237 52 292Q52 355 102 398T223 442Q274 442 318 416L329 409ZM299 343Q294 371 273 387T221 404Q192 404 171 388T145 343Q142 326 142 292Q142 248 149 227T179 192Q196 182 222 182Q244 182 260 189T283 207T294 227T299 242Q302 258 302 292T299 343ZM403 -75Q403 -50 389 -34T348 -11T299 -2T245 0H218Q151 0 138 -6Q118 -15 107 -34T95 -74Q95 -84 101 -97T122 -127T170 -155T250 -167Q319 -167 361 -139T403 -75Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-68' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 124T102 167T103 217T103 272T103 329Q103 366 103 407T103 482T102 542T102 586T102 603Q99 622 88 628T43 637H25V660Q25 683 27 683L37 684Q47 685 66 686T103 688Q120 689 140 690T170 693T181 694H184V367Q244 442 328 442Q451 442 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-28' d='M701 -940Q701 -943 695 -949H664Q662 -947 636 -922T591 -879T537 -818T475 -737T412 -636T350 -511T295 -362T250 -186T221 17T209 251Q209 962 573 1361Q596 1386 616 1405T649 1437T664 1450H695Q701 1444 701 1441Q701 1436 681 1415T629 1356T557 1261T476 1118T400 927T340 675T308 359Q306 321 306 250Q306 -139 400 -430T690 -924Q701 -936 701 -940Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ3-29' d='M34 1438Q34 1446 37 1448T50 1450H56H71Q73 1448 99 1423T144 1380T198 1319T260 1238T323 1137T385 1013T440 864T485 688T514 485T526 251Q526 134 519 53Q472 -519 162 -860Q139 -885 119 -904T86 -936T71 -949H56Q43 -949 39 -947T34 -937Q88 -883 140 -813Q428 -430 428 251Q428 453 402 628T338 922T245 1146T145 1309T46 1425Q44 1427 42 1429T39 1433T36 1436L34 1438Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='729' y='0'%3e%3c/use%3e %3cg transform='translate(1785%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-61'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-63' x='893' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-74' x='1337' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='1727' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='2227' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(4569%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ3-28'%3e%3c/use%3e %3cg transform='translate(736%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='9738' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c776)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='1182' y='0'%3e%3c/use%3e %3cg transform='translate(1032%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='2907' y='0'%3e%3c/use%3e %3cg transform='translate(2330%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-6C' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-65' x='778' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-66' x='1223' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='1529' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='1919' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='5805' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='6195' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='6973' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='8022' y='0'%3e%3c/use%3e %3cg transform='translate(5869%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='9747' y='0'%3e%3c/use%3e %3cg transform='translate(7167%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-188)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7B'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-72' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-69' x='893' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-67' x='1171' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-68' x='1672' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-74' x='2228' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-7D' x='2618' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='13212' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='6361' y='-606'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ3-29' x='10714' y='-1'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) (2)
(2)
The key difference between these formulas lies in how the distances between the front and rear axles (L) and between the front wheels (W) are incorporated.
In the first formula (1), the term ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c7)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='955' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c446)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='151' y='-606'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) appears in the numerator, while in the second formula (2), the term
appears in the numerator, while in the second formula (2), the term ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c111)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='1569' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='768' y='631'%3e%3c/use%3e %3cg transform='translate(60%2c-476)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2F' x='1048' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1549' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) appears. These terms determine the influence of the steering angles on the overall steering angle.
appears. These terms determine the influence of the steering angles on the overall steering angle.
Formula (1) suggests that the impact of the steering angles on the overall steering angle is weighted more significantly, as it incorporates the ratio in the numerator. This indicates a stronger influence of the axle distance (L) on the overall steering angle.
Formula (2) assumes that the impact of the steering angles is relatively balanced, as it incorporates the ratio in the numerator. This implies that the wheelbase distance (L) and track width (W) have a relatively equal effect on the overall steering angle.
Therefore, the choice between the two formulas depends on the specific considerations and assumptions made regarding the influence of the distances between the front and rear axles and the front wheels on the overall steering angle.
Simplified assumption
The following models assume that the vehicle is turning on a flat surface. In real-world scenarios, factors like tire slip, suspension geometry, and uneven surfaces can affect the accuracy of these calculations.
When we only consider the steering angle delta, the longitudinal velocity , and the track width W to calculate the . It assumes that the vehicle is moving on a flat surface, and the approximation is valid for small steering angles. However, it does not account for the Ackermann steering principle or the individual steering angles of the left (' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) ) and right (
) and right (' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) ) wheels.
) wheels.
When we consider the average of the left, right steering angles, the longitudinal velocity , and the wheelbase distance L to calculate the ,. This expression assumes a symmetric steering setup and disregards the Ackermann steering principle.
Reference:
(1) https://link.springer.com/book/10.1007/978-0-387-74244-1 by Reza N. Jazar
(2) https://www.sae.org/publications/books/content/r-506/ by by Thomas D. Gillespie
(3) https://en.wikipedia.org/wiki/Ackermann_steering_geometry
(4) https://www.racecar-engineering.com/articles/tech-explained-ackermann-steering-geometry/
(5) Mobile Robot Kinematics - Autonomous Mobile Robots - ETH Zürich
(6) Mobile Robot Kinematics - CMU
(7) Modeling, Control and Path Planning for an Articulated Vehicle
(8) Tire model - Hans B. Pacejka
The calculation to derive the vehicle speed with the simplified models
Balanced car model (lateral two-wheel model)


Lateral two-wheels model
Longitudinal velocity:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-52)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='2519' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='766' y='-260'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1275' y='0'%3e%3c/use%3e %3cg transform='translate(1452%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='766' y='-260'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1531' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='5404' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='5904' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
 %5ccdot %5cfrac%7bL%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-28' d='M180 96T180 250T205 541T266 770T353 944T444 1069T527 1150H555Q561 1144 561 1141Q561 1137 545 1120T504 1072T447 995T386 878T330 721T288 513T272 251Q272 133 280 56Q293 -87 326 -209T399 -405T475 -531T536 -609T561 -640Q561 -643 555 -649H527Q483 -612 443 -568T353 -443T266 -270T205 -41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-29' d='M35 1138Q35 1150 51 1150H56H69Q113 1113 153 1069T243 944T330 771T391 541T416 250T391 -40T330 -270T243 -443T152 -568T69 -649H56Q43 -649 39 -647T35 -637Q65 -607 110 -548Q283 -316 316 56Q324 133 324 251Q324 368 316 445Q278 877 48 1123Q36 1137 35 1138Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3679' y='0'%3e%3c/use%3e %3cg transform='translate(4180%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(5627%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-28'%3e%3c/use%3e %3cg transform='translate(597%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='2267' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='547' y='-260'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1097' y='0'%3e%3c/use%3e %3cg transform='translate(1326%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='547' y='-260'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1353' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ2-29' x='3105' y='-1'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='9552' y='0'%3e%3c/use%3e %3cg transform='translate(9830%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='601' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='84' y='631'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='175' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
or
 %5ccdot %5cfrac%7bW%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-14)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3679' y='0'%3e%3c/use%3e %3cg transform='translate(4180%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='5627' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='6016' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='6468' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='7079' y='0'%3e%3c/use%3e %3cg transform='translate(7358%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='861' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='84' y='651'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='358' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Bicycle model (longitudinal two-wheel model)

-20230516-132309.png?inst-v=e65987b7-7f92-4b87-8e0b-82ace1c12534)
Longitudinal two-wheels model
Longitudinal velocity:
%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-63' d='M370 305T349 305T313 320T297 358Q297 381 312 396Q317 401 317 402T307 404Q281 408 258 408Q209 408 178 376Q131 329 131 219Q131 137 162 90Q203 29 272 29Q313 29 338 55T374 117Q376 125 379 127T395 129H409Q415 123 415 120Q415 116 411 104T395 71T366 33T318 2T249 -11Q163 -11 99 53T34 214Q34 318 99 383T250 448T370 421T404 357Q404 334 387 320Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6F' d='M28 214Q28 309 93 378T250 448Q340 448 405 380T471 215Q471 120 407 55T250 -10Q153 -10 91 57T28 214ZM250 30Q372 30 372 193V225V250Q372 272 371 288T364 326T348 362T317 390T268 410Q263 411 252 411Q222 411 195 399Q152 377 139 338T126 246V226Q126 130 145 91Q177 30 250 30Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-73' d='M295 316Q295 356 268 385T190 414Q154 414 128 401Q98 382 98 349Q97 344 98 336T114 312T157 287Q175 282 201 278T245 269T277 256Q294 248 310 236T342 195T359 133Q359 71 321 31T198 -10H190Q138 -10 94 26L86 19L77 10Q71 4 65 -1L54 -11H46H42Q39 -11 33 -5V74V132Q33 153 35 157T45 162H54Q66 162 70 158T75 146T82 119T101 77Q136 26 198 26Q295 26 295 104Q295 133 277 151Q257 175 194 187T111 210Q75 227 54 256T33 318Q33 357 50 384T93 424T143 442T187 447H198Q238 447 268 432L283 424L292 431Q302 440 314 448H322H326Q329 448 335 442V310L329 304H301Q295 310 295 316Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2422%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3904' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='4404' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='5386' y='0'%3e%3c/use%3e %3cg transform='translate(5887%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-63'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6F' x='444' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-73' x='945' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='7226' y='0'%3e%3c/use%3e %3cg transform='translate(7616%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='8690' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
or
where' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) is the rear wheel’s speed,
is the rear wheel’s speed, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) is the steering angle of the front wheel.
is the steering angle of the front wheel.
Lateral velocity:
%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-73' d='M295 316Q295 356 268 385T190 414Q154 414 128 401Q98 382 98 349Q97 344 98 336T114 312T157 287Q175 282 201 278T245 269T277 256Q294 248 310 236T342 195T359 133Q359 71 321 31T198 -10H190Q138 -10 94 26L86 19L77 10Q71 4 65 -1L54 -11H46H42Q39 -11 33 -5V74V132Q33 153 35 157T45 162H54Q66 162 70 158T75 146T82 119T101 77Q136 26 198 26Q295 26 295 104Q295 133 277 151Q257 175 194 187T111 210Q75 227 54 256T33 318Q33 357 50 384T93 424T143 442T187 447H198Q238 447 268 432L283 424L292 431Q302 440 314 448H322H326Q329 448 335 442V310L329 304H301Q295 310 295 316Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-3)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3851' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='4351' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='5333' y='0'%3e%3c/use%3e %3cg transform='translate(5834%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-73'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-69' x='394' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='673' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='7063' y='0'%3e%3c/use%3e %3cg transform='translate(7453%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='8527' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
or
%7d%7b2%7d %5ccdot %5cfrac%7b%5comega_F - %5comega_R%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-119)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2091%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='3517' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-78' x='718' y='-185'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='1148' y='0'%3e%3c/use%3e %3cg transform='translate(1008%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='2873' y='0'%3e%3c/use%3e %3cg transform='translate(2307%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='547' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4415' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='2237' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='6349' y='0'%3e%3c/use%3e %3cg transform='translate(6627%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='2558' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='766' y='-257'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2212' x='1330' y='0'%3e%3c/use%3e %3cg transform='translate(1491%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='766' y='-260'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1558' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
In this case, the bicycle's speed can be calculated using a single wheel's angular speed (either front or rear) since they are assumed to be the same during normal conditions:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1047' y='0'%3e%3c/use%3e %3cg transform='translate(2103%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3585' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='4086' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
a bicycle's front and rear wheels can have different speeds, but this typically occurs under specific conditions, such as:
Skidding or slipping: When a bicycle skids or slips (e.g., on wet or icy surfaces), the rear wheel could lock up or lose traction, causing its speed to differ from the front wheel. In this case, the rear wheel speed could be lower than the front wheel speed.
Turning: During a turn, the front and rear wheels travel slightly different paths, and their speeds might differ momentarily. However, this difference is generally small and not as significant as in the case of skidding or slipping.
4WS vehicle model with all-steering (e.g., some tractors)

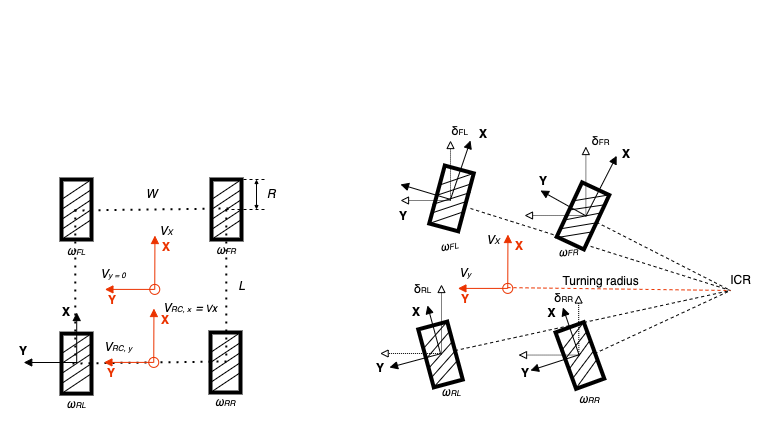
Four-wheel steering vehicle
Longitudinal velocity:
 %7d%7d%7b4%7d%5ccdot R%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-34' d='M462 0Q444 3 333 3Q217 3 199 0H190V46H221Q241 46 248 46T265 48T279 53T286 61Q287 63 287 115V165H28V211L179 442Q332 674 334 675Q336 677 355 677H373L379 671V211H471V165H379V114Q379 73 379 66T385 54Q393 47 442 46H471V0H462ZM293 211V545L74 212L183 211H293Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-115)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='7525' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='2150' y='0'%3e%3c/use%3e %3cg transform='translate(2071%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='4779' y='0'%3e%3c/use%3e %3cg transform='translate(3930%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='7386' y='0'%3e%3c/use%3e %3cg transform='translate(5773%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='10083' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-34' x='5071' y='-600'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='10410' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='10910' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
 %5ccdot %5ctan(%5cdelta_%7b%5ctext%7bF%7d%7d) %5ccdot %5cfrac%7b%7bW%7d%7d%7b2%7d %2b (%5comega_%7b%5ctext%7bRL%7d%7d %2b %5comega_%7b%5ctext%7bRR%7d%7d) %5ccdot %5ctan(%5cdelta_%7b%5ctext%7bR%7d%7d) %5ccdot %5cfrac%7b%7bW%7d%7d%7b2%7d%7d%7d%7b%7b2 %5ccdot L%7d%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-347)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2091%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='15503' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c845)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='2150' y='0'%3e%3c/use%3e %3cg transform='translate(2071%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4779' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='5169' y='0'%3e%3c/use%3e %3cg transform='translate(3852%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='6894' y='0'%3e%3c/use%3e %3cg transform='translate(5150%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46' x='547' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='8358' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='8748' y='0'%3e%3c/use%3e %3cg transform='translate(6382%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='721' height='60' x='0' y='146'%3e%3c/rect%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-57' x='104' y='669'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-32' x='378' y='-698'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='10387' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='11165' y='0'%3e%3c/use%3e %3cg transform='translate(8170%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='13383' y='0'%3e%3c/use%3e %3cg transform='translate(10014%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='16080' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='16469' y='0'%3e%3c/use%3e %3cg transform='translate(11842%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='18194' y='0'%3e%3c/use%3e %3cg transform='translate(13141%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='547' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='19726' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='20116' y='0'%3e%3c/use%3e %3cg transform='translate(14421%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='721' height='60' x='0' y='146'%3e%3c/rect%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-57' x='104' y='669'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-32' x='378' y='-698'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cg transform='translate(7235%2c-429)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
 %2b L %5ccdot %5ctan(%5cdelta_%7b%5ctext%7bFR%7d%7d)%7d%7d%7b%7b2 %5ccdot W%7d%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-105)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='628' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1284' y='0'%3e%3c/use%3e %3cg transform='translate(2062%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='7477' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='681' y='0'%3e%3c/use%3e %3cg transform='translate(678%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='2406' y='0'%3e%3c/use%3e %3cg transform='translate(1977%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4378' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='4768' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='5546' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6228' y='0'%3e%3c/use%3e %3cg transform='translate(4601%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='7953' y='0'%3e%3c/use%3e %3cg transform='translate(5899%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='10015' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(3092%2c-429)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
 - L %5ccdot %5ctan(%5cdelta_%7b%5ctext%7bRR%7d%7d)%7d%7d%7b%7b2 %5ccdot W%7d%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-105)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='628' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1343' y='0'%3e%3c/use%3e %3cg transform='translate(2121%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='7572' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='681' y='0'%3e%3c/use%3e %3cg transform='translate(678%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='2406' y='0'%3e%3c/use%3e %3cg transform='translate(1977%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4446' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2212' x='4835' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='5614' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6295' y='0'%3e%3c/use%3e %3cg transform='translate(4648%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='8020' y='0'%3e%3c/use%3e %3cg transform='translate(5946%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='10150' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(3140%2c-429)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='500' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
in a simplified model, which the is already obtained.
4WS vehicle model with front steering

-20230526-131123.png?inst-v=e65987b7-7f92-4b87-8e0b-82ace1c12534)
vehicle model with front steering
Longitudinal velocity:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-48)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='7202' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1884' y='0'%3e%3c/use%3e %3cg transform='translate(1882%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='4610' y='0'%3e%3c/use%3e %3cg transform='translate(3810%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='7281' y='0'%3e%3c/use%3e %3cg transform='translate(5699%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-34' x='4842' y='-600'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='10086' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='10587' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
 %5ccdot %5cfrac%7bL%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-28' d='M180 96T180 250T205 541T266 770T353 944T444 1069T527 1150H555Q561 1144 561 1141Q561 1137 545 1120T504 1072T447 995T386 878T330 721T288 513T272 251Q272 133 280 56Q293 -87 326 -209T399 -405T475 -531T536 -609T561 -640Q561 -643 555 -649H527Q483 -612 443 -568T353 -443T266 -270T205 -41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-29' d='M35 1138Q35 1150 51 1150H56H69Q113 1113 153 1069T243 944T330 771T391 541T416 250T391 -40T330 -270T243 -443T152 -568T69 -649H56Q43 -649 39 -647T35 -637Q65 -607 110 -548Q283 -316 316 56Q324 133 324 251Q324 368 316 445Q278 877 48 1123Q36 1137 35 1138Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3679' y='0'%3e%3c/use%3e %3cg transform='translate(4180%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(5627%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-28'%3e%3c/use%3e %3cg transform='translate(597%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='3128' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1706' y='0'%3e%3c/use%3e %3cg transform='translate(1756%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1961' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ2-29' x='3965' y='-1'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='10412' y='0'%3e%3c/use%3e %3cg transform='translate(10691%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='601' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='84' y='631'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='175' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
or
FWD vehicle model with front steering

Longitudinal velocity:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-52)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='3380' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1884' y='0'%3e%3c/use%3e %3cg transform='translate(1882%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='2139' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='6264' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='6765' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
or
RWD vehicle model with front steering

Longitudinal velocity:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-52)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='3391' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1892' y='0'%3e%3c/use%3e %3cg transform='translate(1888%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='2147' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='6276' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='6776' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
or
RWD vehicle model with rear steering (e.g., large sweeper)

Longitudinal velocity:
Lateral velocity:
 %5ccdot %5cfrac%7bL%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-74' d='M27 422Q80 426 109 478T141 600V615H181V431H316V385H181V241Q182 116 182 100T189 68Q203 29 238 29Q282 29 292 100Q293 108 293 146V181H333V146V134Q333 57 291 17Q264 -10 221 -10Q187 -10 162 2T124 33T105 68T98 100Q97 107 97 248V385H18V422H27Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-61' d='M137 305T115 305T78 320T63 359Q63 394 97 421T218 448Q291 448 336 416T396 340Q401 326 401 309T402 194V124Q402 76 407 58T428 40Q443 40 448 56T453 109V145H493V106Q492 66 490 59Q481 29 455 12T400 -6T353 12T329 54V58L327 55Q325 52 322 49T314 40T302 29T287 17T269 6T247 -2T221 -8T190 -11Q130 -11 82 20T34 107Q34 128 41 147T68 188T116 225T194 253T304 268H318V290Q318 324 312 340Q290 411 215 411Q197 411 181 410T156 406T148 403Q170 388 170 359Q170 334 154 320ZM126 106Q126 75 150 51T209 26Q247 26 276 49T315 109Q317 116 318 175Q318 233 317 233Q309 233 296 232T251 223T193 203T147 166T126 106Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-28' d='M180 96T180 250T205 541T266 770T353 944T444 1069T527 1150H555Q561 1144 561 1141Q561 1137 545 1120T504 1072T447 995T386 878T330 721T288 513T272 251Q272 133 280 56Q293 -87 326 -209T399 -405T475 -531T536 -609T561 -640Q561 -643 555 -649H527Q483 -612 443 -568T353 -443T266 -270T205 -41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-29' d='M35 1138Q35 1150 51 1150H56H69Q113 1113 153 1069T243 944T330 771T391 541T416 250T391 -40T330 -270T243 -443T152 -568T69 -649H56Q43 -649 39 -647T35 -637Q65 -607 110 -548Q283 -316 316 56Q324 133 324 251Q324 368 316 445Q278 877 48 1123Q36 1137 35 1138Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3679' y='0'%3e%3c/use%3e %3cg transform='translate(4180%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-74'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-61' x='389' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='890' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(5627%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-28'%3e%3c/use%3e %3cg transform='translate(597%2c0)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='3139' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c606)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1714' y='0'%3e%3c/use%3e %3cg transform='translate(1762%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(314%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1969' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ2-29' x='3977' y='-1'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='10424' y='0'%3e%3c/use%3e %3cg transform='translate(10702%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='601' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='84' y='631'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='175' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
or
4WS vehicle model without a steering wheel (e.g., some robotic chassis)

For a 4WS vehicle model without a steering wheel (e.g., some robotic chassis), the steering is typically controlled by differential wheel speeds.
Longitudinal velocity:
Lateral velocity:
 - (%5comega_%7bFR%7d %2b %5comega_%7bRR%7d)%7d%7b2%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-119)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2091%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='657' height='60' x='0' y='220'%3e%3c/rect%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='84' y='650'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='214' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='3488' y='0'%3e%3c/use%3e %3cg transform='translate(3767%2c0)'%3e %3cg transform='translate(342%2c0)'%3e %3crect stroke='none' width='8303' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(59%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='2273' y='0'%3e%3c/use%3e %3cg transform='translate(2158%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-4C' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='4944' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2212' x='5334' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='6112' y='0'%3e%3c/use%3e %3cg transform='translate(4597%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='8449' y='0'%3e%3c/use%3e %3cg transform='translate(6525%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='759' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='11183' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='5621' y='-589'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Front-rear axle articulated vehicle (front steering, e.g., some tractors)
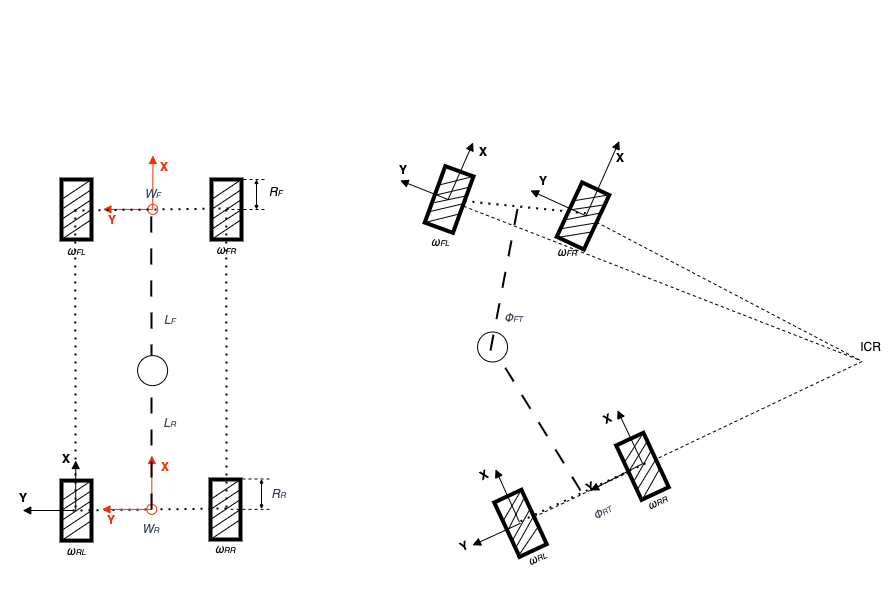
Front-rear axle articulated vehicle
Longitudinal velocity:
%7d%7d%7b4%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-34' d='M462 0Q444 3 333 3Q217 3 199 0H190V46H221Q241 46 248 46T265 48T279 53T286 61Q287 63 287 115V165H28V211L179 442Q332 674 334 675Q336 677 355 677H373L379 671V211H471V165H379V114Q379 73 379 66T385 54Q393 47 442 46H471V0H462ZM293 211V545L74 212L183 211H293Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-115)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2144%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='12476' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c622)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='2150' y='0'%3e%3c/use%3e %3cg transform='translate(1717%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='935' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='3896' y='0'%3e%3c/use%3e %3cg transform='translate(3305%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6526' y='0'%3e%3c/use%3e %3cg transform='translate(4811%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='935' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='8272' y='0'%3e%3c/use%3e %3cg transform='translate(6400%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='10879' y='0'%3e%3c/use%3e %3cg transform='translate(7889%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='935' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='12634' y='0'%3e%3c/use%3e %3cg transform='translate(9484%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='15331' y='0'%3e%3c/use%3e %3cg transform='translate(11037%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='935' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='17085' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-34' x='8572' y='-600'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity:
%2bL_R %5ccdot%5cleft(%5comega_%7b%5cmathrm%7bFL%7d%7d %5ccdot R_F-%5comega_%7b%5cmathrm%7bRL%7d%7d %5ccdot R_R%5cright)%2b%5cleft(W_%7b%5cmathrm%7bF%7d%7d %5ccdot %5cdot%7b%5cphi%7d_%7b%5cmathrm%7bFT%7d%7d%2bW_%7b%5cmathrm%7bR%7d%7d %5ccdot %5cdot%7b%5cphi%7d_%7b%5cmathrm%7bRT%7d%7d%5cright)%7d%7bL_F%2bL_R%7d%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3D5' d='M409 688Q413 694 421 694H429H442Q448 688 448 686Q448 679 418 563Q411 535 404 504T392 458L388 442Q388 441 397 441T429 435T477 418Q521 397 550 357T579 260T548 151T471 65T374 11T279 -10H275L251 -105Q245 -128 238 -160Q230 -192 227 -198T215 -205H209Q189 -205 189 -198Q189 -193 211 -103L234 -11Q234 -10 226 -10Q221 -10 206 -8T161 6T107 36T62 89T43 171Q43 231 76 284T157 370T254 422T342 441Q347 441 348 445L378 567Q409 686 409 688ZM122 150Q122 116 134 91T167 53T203 35T237 27H244L337 404Q333 404 326 403T297 395T255 379T211 350T170 304Q152 276 137 237Q122 191 122 150ZM500 282Q500 320 484 347T444 385T405 400T381 404H378L332 217L284 29Q284 27 285 27Q293 27 317 33T357 47Q400 66 431 100T475 170T494 234T500 282Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2D9' d='M190 609Q190 637 208 653T252 669Q275 667 292 652T309 609Q309 579 292 564T250 549Q225 549 208 564T190 609Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-54' d='M36 443Q37 448 46 558T55 671V677H666V671Q667 666 676 556T685 443V437H645V443Q645 445 642 478T631 544T610 593Q593 614 555 625Q534 630 478 630H451H443Q417 630 414 618Q413 616 413 339V63Q420 53 439 50T528 46H558V0H545L361 3Q186 1 177 0H164V46H194Q264 46 283 49T309 63V339V550Q309 620 304 625T271 630H244H224Q154 630 119 601Q101 585 93 554T81 486T76 443V437H36V443Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-28' d='M180 96T180 250T205 541T266 770T353 944T444 1069T527 1150H555Q561 1144 561 1141Q561 1137 545 1120T504 1072T447 995T386 878T330 721T288 513T272 251Q272 133 280 56Q293 -87 326 -209T399 -405T475 -531T536 -609T561 -640Q561 -643 555 -649H527Q483 -612 443 -568T353 -443T266 -270T205 -41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-29' d='M35 1138Q35 1150 51 1150H56H69Q113 1113 153 1069T243 944T330 771T391 541T416 250T391 -40T330 -270T243 -443T152 -568T69 -649H56Q43 -649 39 -647T35 -637Q65 -607 110 -548Q283 -316 316 56Q324 133 324 251Q324 368 316 445Q278 877 48 1123Q36 1137 35 1138Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-315)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2091%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='22719' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c904)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='839' y='-257'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='1389' y='0'%3e%3c/use%3e %3cg transform='translate(1179%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='2240' y='0'%3e%3c/use%3e %3cg transform='translate(1781%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='935' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2212' x='3986' y='0'%3e%3c/use%3e %3cg transform='translate(3369%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6683' y='0'%3e%3c/use%3e %3cg transform='translate(4923%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='935' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='8438' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='10496' y='0'%3e%3c/use%3e %3cg transform='translate(7972%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='839' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='12673' y='0'%3e%3c/use%3e %3cg transform='translate(9158%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(275%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='2150' y='0'%3e%3c/use%3e %3cg transform='translate(1717%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='935' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2212' x='3896' y='0'%3e%3c/use%3e %3cg transform='translate(3305%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(440%2c-150)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6503' y='0'%3e%3c/use%3e %3cg transform='translate(4795%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='935' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-29' x='8258' y='0'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='21599' y='0'%3e%3c/use%3e %3cg transform='translate(15823%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJSZ2-28'%3e%3c/use%3e %3cg transform='translate(422%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46' x='1163' y='-257'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='2172' y='0'%3e%3c/use%3e %3cg transform='translate(1733%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3D5' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2D9' x='165' y='299'%3e%3c/use%3e %3cg transform='translate(471%2c-175)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='4334' y='0'%3e%3c/use%3e %3cg transform='translate(3615%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='1163' y='-260'%3e%3c/use%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-22C5' x='6755' y='0'%3e%3c/use%3e %3cg transform='translate(4973%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-3D5' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2D9' x='165' y='299'%3e%3c/use%3e %3cg transform='translate(471%2c-175)'%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJSZ2-29' x='8984' y='-1'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cg transform='translate(10098%2c-429)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-46' x='839' y='-257'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-2B' x='1389' y='0'%3e%3c/use%3e %3cg transform='translate(1533%2c0)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.574)' xlink:href='%23E1-MJMATHI-52' x='839' y='-260'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
In these equations:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='1074' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1321' y='0'%3e%3c/use%3e %3cg transform='translate(1766%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='1074' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the radii of the front and rear wheels
represent the radii of the front and rear wheels
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='963' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1311' y='0'%3e%3c/use%3e %3cg transform='translate(1756%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='963' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the lengths of the front and rear segments
represent the lengths of the front and rear segments' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-84)'%3e %3cuse xlink:href='%23E1-MJMATHI-3D5' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='131' y='254'%3e%3c/use%3e %3cg transform='translate(631%2c-242)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1704' y='0'%3e%3c/use%3e %3cg transform='translate(2149%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3D5' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='131' y='254'%3e%3c/use%3e %3cg transform='translate(631%2c-242)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the transaxle rotational rate of the front and rear segments
represent the transaxle rotational rate of the front and rear segments
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='1335' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1574' y='0'%3e%3c/use%3e %3cg transform='translate(2019%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the track widths of the front and rear segments
represent the track widths of the front and rear segments
%2bL_R %5ccdot%5cleft(%5comega_%7b%5cmathrm%7bFL%7d%7d %5ccdot R_F-%5comega_%7b%5cmathrm%7bRL%7d%7d %5ccdot R_R%5cright)%2b%5cleft(W_%7b%5cmathrm%7bF%7d%7d %5ccdot %5cdot%7b%5cPhi%7d_%7b%5cmathrm%7bFT%7d%7d%2bW_%7b%5cmathrm%7bR%7d%7d %5ccdot %5cdot%7b%5cPhi%7d_%7b%5cmathrm%7bRT%7d%7d%5cright)%7d%7bL_F%2bL_R%7d%2b %26amp%3b %5cfrac%7b%5cleft(W_%7b%5cmathrm%7bF%7d%7d %5ccdot %5csin %5cleft(%5cPhi_%7b%5cmathrm%7bFT%7d%7d%5cright)%2bW_%7b%5cmathrm%7bR%7d%7d %5ccdot %5csin %5cleft(%5cPhi_%7b%5cmathrm%7bRT%7d%7d%5cright)%5cright) %5ccdot%5cleft(%5cdot%7b%5cdelta%7d_%7b%5cmathrm%7bF%7d%7d%2b%5cdot%7b%5cdelta%7d_%7b%5cmathrm%7bR%7d%7d%5cright)%7d%7bL_1%2bL_2%7d %5cend%7baligned%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-22C5' d='M78 250Q78 274 95 292T138 310Q162 310 180 294T199 251Q199 226 182 208T139 190T96 207T78 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-46' d='M128 619Q121 626 117 628T101 631T58 634H25V680H582V676Q584 670 596 560T610 444V440H570V444Q563 493 561 501Q555 538 543 563T516 601T477 622T431 631T374 633H334H286Q252 633 244 631T233 621Q232 619 232 490V363H284Q287 363 303 363T327 364T349 367T372 373T389 385Q407 403 410 459V480H450V200H410V221Q407 276 389 296Q381 303 371 307T348 313T327 316T303 317T284 317H232V189L233 61Q240 54 245 52T270 48T333 46H360V0H348Q324 3 182 3Q51 3 36 0H25V46H58Q100 47 109 49T128 61V619Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-52' d='M130 622Q123 629 119 631T103 634T60 637H27V683H202H236H300Q376 683 417 677T500 648Q595 600 609 517Q610 512 610 501Q610 468 594 439T556 392T511 361T472 343L456 338Q459 335 467 332Q497 316 516 298T545 254T559 211T568 155T578 94Q588 46 602 31T640 16H645Q660 16 674 32T692 87Q692 98 696 101T712 105T728 103T732 90Q732 59 716 27T672 -16Q656 -22 630 -22Q481 -16 458 90Q456 101 456 163T449 246Q430 304 373 320L363 322L297 323H231V192L232 61Q238 51 249 49T301 46H334V0H323Q302 3 181 3Q59 3 38 0H27V46H60Q102 47 111 49T130 61V622ZM491 499V509Q491 527 490 539T481 570T462 601T424 623T362 636Q360 636 340 636T304 637H283Q238 637 234 628Q231 624 231 492V360H289Q390 360 434 378T489 456Q491 467 491 499Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2212' d='M84 237T84 250T98 270H679Q694 262 694 250T679 230H98Q84 237 84 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-4C' d='M128 622Q121 629 117 631T101 634T58 637H25V683H36Q48 680 182 680Q324 680 348 683H360V637H333Q273 637 258 635T233 622L232 342V129Q232 57 237 52Q243 47 313 47Q384 47 410 53Q470 70 498 110T536 221Q536 226 537 238T540 261T542 272T562 273H582V268Q580 265 568 137T554 5V0H25V46H58Q100 47 109 49T128 61V622Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-57' d='M436 683Q450 683 486 682T553 680Q604 680 638 681T677 682Q695 682 695 674Q695 670 692 659Q687 641 683 639T661 637Q636 636 621 632T600 624T597 615Q597 603 613 377T629 138L631 141Q633 144 637 151T649 170T666 200T690 241T720 295T759 362Q863 546 877 572T892 604Q892 619 873 628T831 637Q817 637 817 647Q817 650 819 660Q823 676 825 679T839 682Q842 682 856 682T895 682T949 681Q1015 681 1034 683Q1048 683 1048 672Q1048 666 1045 655T1038 640T1028 637Q1006 637 988 631T958 617T939 600T927 584L923 578L754 282Q586 -14 585 -15Q579 -22 561 -22Q546 -22 542 -17Q539 -14 523 229T506 480L494 462Q472 425 366 239Q222 -13 220 -15T215 -19Q210 -22 197 -22Q178 -22 176 -15Q176 -12 154 304T131 622Q129 631 121 633T82 637H58Q51 644 51 648Q52 671 64 683H76Q118 680 176 680Q301 680 313 683H323Q329 677 329 674T327 656Q322 641 318 637H297Q236 634 232 620Q262 160 266 136L501 550L499 587Q496 629 489 632Q483 636 447 637Q428 637 422 639T416 648Q416 650 418 660Q419 664 420 669T421 676T424 680T428 682T436 683Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3A6' d='M312 622Q310 623 307 625T303 629T297 631T286 634T270 635T246 636T211 637H184V683H196Q220 680 361 680T526 683H538V637H511Q468 637 447 635T422 631T411 622V533L425 531Q525 519 595 466T665 342Q665 301 642 267T583 209T506 172T425 152L411 150V61Q417 55 421 53T447 48T511 46H538V0H526Q502 3 361 3T196 0H184V46H211Q231 46 245 46T270 47T286 48T297 51T303 54T307 57T312 61V150H310Q309 151 289 153T232 166T160 195Q149 201 136 210T103 238T69 284T56 342Q56 414 128 467T294 530Q309 532 310 533H312V622ZM170 342Q170 207 307 188H312V495H309Q301 495 282 491T231 469T186 423Q170 389 170 342ZM415 188Q487 199 519 236T551 342Q551 384 539 414T507 459T470 481T434 491T415 495H410V188H415Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2D9' d='M190 609Q190 637 208 653T252 669Q275 667 292 652T309 609Q309 579 292 564T250 549Q225 549 208 564T190 609Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-54' d='M36 443Q37 448 46 558T55 671V677H666V671Q667 666 676 556T685 443V437H645V443Q645 445 642 478T631 544T610 593Q593 614 555 625Q534 630 478 630H451H443Q417 630 414 618Q413 616 413 339V63Q420 53 439 50T528 46H558V0H545L361 3Q186 1 177 0H164V46H194Q264 46 283 49T309 63V339V550Q309 620 304 625T271 630H244H224Q154 630 119 601Q101 585 93 554T81 486T76 443V437H36V443Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ1-28' d='M152 251Q152 646 388 850H416Q422 844 422 841Q422 837 403 816T357 753T302 649T255 482T236 250Q236 124 255 19T301 -147T356 -251T403 -315T422 -340Q422 -343 416 -349H388Q359 -325 332 -296T271 -213T212 -97T170 56T152 251Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ1-29' d='M305 251Q305 -145 69 -349H56Q43 -349 39 -347T35 -338Q37 -333 60 -307T108 -239T160 -136T204 27T221 250T204 473T160 636T108 740T60 807T35 839Q35 850 50 850H56H69Q197 743 256 566Q305 425 305 251Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-73' d='M295 316Q295 356 268 385T190 414Q154 414 128 401Q98 382 98 349Q97 344 98 336T114 312T157 287Q175 282 201 278T245 269T277 256Q294 248 310 236T342 195T359 133Q359 71 321 31T198 -10H190Q138 -10 94 26L86 19L77 10Q71 4 65 -1L54 -11H46H42Q39 -11 33 -5V74V132Q33 153 35 157T45 162H54Q66 162 70 158T75 146T82 119T101 77Q136 26 198 26Q295 26 295 104Q295 133 277 151Q257 175 194 187T111 210Q75 227 54 256T33 318Q33 357 50 384T93 424T143 442T187 447H198Q238 447 268 432L283 424L292 431Q302 440 314 448H322H326Q329 448 335 442V310L329 304H301Q295 310 295 316Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-69' d='M69 609Q69 637 87 653T131 669Q154 667 171 652T188 609Q188 579 171 564T129 549Q104 549 87 564T69 609ZM247 0Q232 3 143 3Q132 3 106 3T56 1L34 0H26V46H42Q70 46 91 49Q100 53 102 60T104 102V205V293Q104 345 102 359T88 378Q74 385 41 385H30V408Q30 431 32 431L42 432Q52 433 70 434T106 436Q123 437 142 438T171 441T182 442H185V62Q190 52 197 50T232 46H255V0H247Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-6E' d='M41 46H55Q94 46 102 60V68Q102 77 102 91T102 122T103 161T103 203Q103 234 103 269T102 328V351Q99 370 88 376T43 385H25V408Q25 431 27 431L37 432Q47 433 65 434T102 436Q119 437 138 438T167 441T178 442H181V402Q181 364 182 364T187 369T199 384T218 402T247 421T285 437Q305 442 336 442Q450 438 463 329Q464 322 464 190V104Q464 66 466 59T477 49Q498 46 526 46H542V0H534L510 1Q487 2 460 2T422 3Q319 3 310 0H302V46H318Q379 46 379 62Q380 64 380 200Q379 335 378 343Q372 371 358 385T334 402T308 404Q263 404 229 370Q202 343 195 315T187 232V168V108Q187 78 188 68T191 55T200 49Q221 46 249 46H265V0H257L234 1Q210 2 183 2T145 3Q42 3 33 0H25V46H41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-28' d='M180 96T180 250T205 541T266 770T353 944T444 1069T527 1150H555Q561 1144 561 1141Q561 1137 545 1120T504 1072T447 995T386 878T330 721T288 513T272 251Q272 133 280 56Q293 -87 326 -209T399 -405T475 -531T536 -609T561 -640Q561 -643 555 -649H527Q483 -612 443 -568T353 -443T266 -270T205 -41Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJSZ2-29' d='M35 1138Q35 1150 51 1150H56H69Q113 1113 153 1069T243 944T330 771T391 541T416 250T391 -40T330 -270T243 -443T152 -568T69 -649H56Q43 -649 39 -647T35 -637Q65 -607 110 -548Q283 -316 316 56Q324 133 324 251Q324 368 316 445Q278 877 48 1123Q36 1137 35 1138Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-31' d='M213 578L200 573Q186 568 160 563T102 556H83V602H102Q149 604 189 617T245 641T273 663Q275 666 285 666Q294 666 302 660V361L303 61Q310 54 315 52T339 48T401 46H427V0H416Q395 3 257 3Q121 3 100 0H88V46H114Q136 46 152 46T177 47T193 50T201 52T207 57T213 61V578Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-476)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2091%2c0)'%3e %3cg transform='translate(397%2c0)'%3e %3crect stroke='none' width='36198' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c869)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='963' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='1533' y='0'%3e%3c/use%3e %3cg transform='translate(2034%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(389%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='2317' y='0'%3e%3c/use%3e %3cg transform='translate(2817%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='1074' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='4429' y='0'%3e%3c/use%3e %3cg transform='translate(5430%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='7416' y='0'%3e%3c/use%3e %3cg transform='translate(7917%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='1074' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='9313' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='11959' y='0'%3e%3c/use%3e %3cg transform='translate(12960%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='963' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='14501' y='0'%3e%3c/use%3e %3cg transform='translate(15002%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(389%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-4C' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='2238' y='0'%3e%3c/use%3e %3cg transform='translate(2739%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='1074' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2212' x='4351' y='0'%3e%3c/use%3e %3cg transform='translate(5351%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-4C' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='7259' y='0'%3e%3c/use%3e %3cg transform='translate(7760%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='1074' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='9156' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='24770' y='0'%3e%3c/use%3e %3cg transform='translate(25771%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ1-28'%3e%3c/use%3e %3cg transform='translate(458%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='2187' y='0'%3e%3c/use%3e %3cg transform='translate(2688%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='111' y='243'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='4705' y='0'%3e%3c/use%3e %3cg transform='translate(5706%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='7493' y='0'%3e%3c/use%3e %3cg transform='translate(7994%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='111' y='243'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ1-29' x='9848' y='-1'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cg transform='translate(16172%2c-704)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='963' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='1533' y='0'%3e%3c/use%3e %3cg transform='translate(2534%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='963' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='38808' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cg transform='translate(41576%2c0)'%3e %3cg transform='translate(0%2c-476)'%3e %3cg transform='translate(120%2c0)'%3e %3crect stroke='none' width='19751' height='60' x='0' y='220'%3e%3c/rect%3e %3cg transform='translate(60%2c1169)'%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(389%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='2118' y='0'%3e%3c/use%3e %3cg transform='translate(2619%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-73'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-69' x='394' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='673' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(3848%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(389%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='2184' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='6645' y='0'%3e%3c/use%3e %3cg transform='translate(7645%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-57' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='1335' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='9433' y='0'%3e%3c/use%3e %3cg transform='translate(9934%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-73'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-69' x='394' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-6E' x='673' y='0'%3e%3c/use%3e %3c/g%3e %3cg transform='translate(11163%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(389%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='2243' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='13796' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-22C5' x='14408' y='0'%3e%3c/use%3e %3cg transform='translate(14909%2c0)'%3e %3cuse xlink:href='%23E1-MJSZ2-28'%3e%3c/use%3e %3cg transform='translate(597%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='24' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='60' y='277'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='792' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='1942' y='0'%3e%3c/use%3e %3cg transform='translate(2943%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='24' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='60' y='277'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='792' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJSZ2-29' x='4124' y='-1'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cg transform='translate(8128%2c-704)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-31' x='963' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='1357' y='0'%3e%3c/use%3e %3cg transform='translate(2358%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='963' y='-213'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) In these equations:
In these equations:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-107)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='111' y='243'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1795' y='0'%3e%3c/use%3e %3cg transform='translate(2240%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='111' y='243'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the front and rear transaxel steering angle rates, respectively.
represent the front and rear transaxel steering angle rates, respectively.' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='653' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) ,
, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMAIN-3A6' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(722%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-52' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-54' x='736' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the front and rear transaxel steering angles, respectively.
represent the front and rear transaxel steering angles, respectively.' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-124)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='286' y='277'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2C' x='1074' y='0'%3e%3c/use%3e %3cg transform='translate(1519%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='628' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2D9' x='290' y='277'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) represent the front and rear steering angle rates, respectively.
represent the front and rear steering angle rates, respectively.
In the context of a tractor or a vehicle with articulated steering, the front and rear transaxle steering angle rates refer to the rates at which the front and rear transaxles are turning. These rates are usually measured in radians per unit of time and indicate how quickly the front and rear segments of the tractor are steering.
On the other hand, the front and rear steering angle rates refer to the rates at which the front and rear wheels are turning. These rates are also measured in radians per unit of time and represent the angular velocity of the front and rear wheels.
In summary, the front and rear transaxle steering angle rates pertain to the steering of the front and rear segments of the tractor, while the front and rear steering angle rates refer to the steering of the front and rear wheels.
Example of the calculation accuracy when using different models
Let's consider an FWD vehicle model with front steering and use real values to demonstrate why the accuracy of vehicle speed estimation is lower when you know only the front-left (FL) wheel speed compared to when you know both front-left and front-right (FR) wheel speeds.
Suppose we have the following data:
Wheel radius (
): 0.3 mWheelbase (
): 2.5 mSteering angles:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) = 5°,
= 5°, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(444%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) = 5°
= 5°Wheel speeds:
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) = 20 rad/s,
= 20 rad/s, ' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-50)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-52' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e) = 22 rad/s
= 22 rad/s
When you know only the FL wheel speed: Estimating longitudinal velocity ( ) using :
' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cg transform='translate(2422%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cg transform='translate(622%2c-150)'%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-4C' x='749' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='4378' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='5101' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='6138' y='0'%3e%3c/use%3e %3cg transform='translate(7195%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-32'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='8418' y='0'%3e%3c/use%3e %3cg transform='translate(9141%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='10698' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='11754' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='12255' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='13133' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='13634' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity ( ) calculation using the average steering angle:
) * L / 2 = 6 * tan(0.5 * (5%c2%b0 %2b 5%c2%b0)) * 2.5 / 2 = 0.65 m/s%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2217' d='M229 286Q216 420 216 436Q216 454 240 464Q241 464 245 464T251 465Q263 464 273 456T283 436Q283 419 277 356T270 286L328 328Q384 369 389 372T399 375Q412 375 423 365T435 338Q435 325 425 315Q420 312 357 282T289 250L355 219L425 184Q434 175 434 161Q434 146 425 136T401 125Q393 125 383 131T328 171L270 213Q283 79 283 63Q283 53 276 44T250 35Q231 35 224 44T216 63Q216 80 222 143T229 213L171 171Q115 130 110 127Q106 124 100 124Q87 124 76 134T64 161Q64 166 64 169T67 175T72 181T81 188T94 195T113 204T138 215T170 230T210 250L74 315Q65 324 65 338Q65 353 74 363T98 374Q106 374 116 368T171 328L229 286Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-74' d='M26 385Q19 392 19 395Q19 399 22 411T27 425Q29 430 36 430T87 431H140L159 511Q162 522 166 540T173 566T179 586T187 603T197 615T211 624T229 626Q247 625 254 615T261 596Q261 589 252 549T232 470L222 433Q222 431 272 431H323Q330 424 330 420Q330 398 317 385H210L174 240Q135 80 135 68Q135 26 162 26Q197 26 230 60T283 144Q285 150 288 151T303 153H307Q322 153 322 145Q322 142 319 133Q314 117 301 95T267 48T216 6T155 -11Q125 -11 98 4T59 56Q57 64 57 83V101L92 241Q127 382 128 383Q128 385 77 385H26Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-61' d='M33 157Q33 258 109 349T280 441Q331 441 370 392Q386 422 416 422Q429 422 439 414T449 394Q449 381 412 234T374 68Q374 43 381 35T402 26Q411 27 422 35Q443 55 463 131Q469 151 473 152Q475 153 483 153H487Q506 153 506 144Q506 138 501 117T481 63T449 13Q436 0 417 -8Q409 -10 393 -10Q359 -10 336 5T306 36L300 51Q299 52 296 50Q294 48 292 46Q233 -10 172 -10Q117 -10 75 30T33 157ZM351 328Q351 334 346 350T323 385T277 405Q242 405 210 374T160 293Q131 214 119 129Q119 126 119 118T118 106Q118 61 136 44T179 26Q217 26 254 59T298 110Q300 114 325 217T351 328Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6E' d='M21 287Q22 293 24 303T36 341T56 388T89 425T135 442Q171 442 195 424T225 390T231 369Q231 367 232 367L243 378Q304 442 382 442Q436 442 469 415T503 336T465 179T427 52Q427 26 444 26Q450 26 453 27Q482 32 505 65T540 145Q542 153 560 153Q580 153 580 145Q580 144 576 130Q568 101 554 73T508 17T439 -10Q392 -10 371 17T350 73Q350 92 386 193T423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 180T152 343Q153 348 153 366Q153 405 129 405Q91 405 66 305Q60 285 60 284Q58 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2E' d='M78 60Q78 84 95 102T138 120Q162 120 180 104T199 61Q199 36 182 18T139 0T96 17T78 60Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-35' d='M164 157Q164 133 148 117T109 101H102Q148 22 224 22Q294 22 326 82Q345 115 345 210Q345 313 318 349Q292 382 260 382H254Q176 382 136 314Q132 307 129 306T114 304Q97 304 95 310Q93 314 93 485V614Q93 664 98 664Q100 666 102 666Q103 666 123 658T178 642T253 634Q324 634 389 662Q397 666 402 666Q410 666 410 648V635Q328 538 205 538Q174 538 149 544L139 546V374Q158 388 169 396T205 412T256 420Q337 420 393 355T449 201Q449 109 385 44T229 -22Q148 -22 99 32T50 154Q50 178 61 192T84 210T107 214Q132 214 148 197T164 157Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2F' d='M423 750Q432 750 438 744T444 730Q444 725 271 248T92 -240Q85 -250 75 -250Q68 -250 62 -245T56 -231Q56 -221 230 257T407 740Q411 750 423 750Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-36' d='M42 313Q42 476 123 571T303 666Q372 666 402 630T432 550Q432 525 418 510T379 495Q356 495 341 509T326 548Q326 592 373 601Q351 623 311 626Q240 626 194 566Q147 500 147 364L148 360Q153 366 156 373Q197 433 263 433H267Q313 433 348 414Q372 400 396 374T435 317Q456 268 456 210V192Q456 169 451 149Q440 90 387 34T253 -22Q225 -22 199 -14T143 16T92 75T56 172T42 313ZM257 397Q227 397 205 380T171 335T154 278T148 216Q148 133 160 97T198 39Q222 21 251 21Q302 21 329 59Q342 77 347 104T352 209Q352 289 347 316T329 361Q302 397 257 397Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-B0' d='M147 628Q147 669 179 692T244 715Q298 715 325 689T352 629Q352 592 323 567T249 542Q202 542 175 567T147 628ZM313 628Q313 660 300 669T259 678H253Q248 678 242 678T234 679Q217 679 207 674T192 659T188 644T187 629Q187 600 198 590Q210 579 250 579H265Q279 579 288 581T305 595T313 628Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-3)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='3679' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='4402' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-61' x='4764' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='5293' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='5894' y='0'%3e%3c/use%3e %3cg transform='translate(6283%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='7785' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='8508' y='0'%3e%3c/use%3e %3cg transform='translate(8897%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='9972' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='10875' y='0'%3e%3c/use%3e %3cg transform='translate(11876%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='12950' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='13710' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='14099' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='14711' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='15434' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='16115' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='16616' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='17394' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='18450' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='19173' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='19896' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-61' x='20257' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='20787' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='21387' y='0'%3e%3c/use%3e %3cg transform='translate(21777%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='23279' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='24001' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='24391' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-B0' x='24891' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='25614' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='26615' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-B0' x='27115' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='27616' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='28005' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='28617' y='0'%3e%3c/use%3e %3cg transform='translate(29340%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-32'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='30619' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='31120' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='31898' y='0'%3e%3c/use%3e %3cg transform='translate(32954%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='1279' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='34734' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='35613' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='36113' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Total vehicle speed:
 = %e2%88%9a(6%5e2 %2b 0.65%5e2) %e2%89%88 6.02 m/s%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-221A' d='M95 178Q89 178 81 186T72 200T103 230T169 280T207 309Q209 311 212 311H213Q219 311 227 294T281 177Q300 134 312 108L397 -77Q398 -77 501 136T707 565T814 786Q820 800 834 800Q841 800 846 794T853 782V776L620 293L385 -193Q381 -200 366 -200Q357 -200 354 -197Q352 -195 256 15L160 225L144 214Q129 202 113 190T95 178Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-36' d='M42 313Q42 476 123 571T303 666Q372 666 402 630T432 550Q432 525 418 510T379 495Q356 495 341 509T326 548Q326 592 373 601Q351 623 311 626Q240 626 194 566Q147 500 147 364L148 360Q153 366 156 373Q197 433 263 433H267Q313 433 348 414Q372 400 396 374T435 317Q456 268 456 210V192Q456 169 451 149Q440 90 387 34T253 -22Q225 -22 199 -14T143 16T92 75T56 172T42 313ZM257 397Q227 397 205 380T171 335T154 278T148 216Q148 133 160 97T198 39Q222 21 251 21Q302 21 329 59Q342 77 347 104T352 209Q352 289 347 316T329 361Q302 397 257 397Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2E' d='M78 60Q78 84 95 102T138 120Q162 120 180 104T199 61Q199 36 182 18T139 0T96 17T78 60Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-35' d='M164 157Q164 133 148 117T109 101H102Q148 22 224 22Q294 22 326 82Q345 115 345 210Q345 313 318 349Q292 382 260 382H254Q176 382 136 314Q132 307 129 306T114 304Q97 304 95 310Q93 314 93 485V614Q93 664 98 664Q100 666 102 666Q103 666 123 658T178 642T253 634Q324 634 389 662Q397 666 402 666Q410 666 410 648V635Q328 538 205 538Q174 538 149 544L139 546V374Q158 388 169 396T205 412T256 420Q337 420 393 355T449 201Q449 109 385 44T229 -22Q148 -22 99 32T50 154Q50 178 61 192T84 210T107 214Q132 214 148 197T164 157Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2248' d='M55 319Q55 360 72 393T114 444T163 472T205 482Q207 482 213 482T223 483Q262 483 296 468T393 413L443 381Q502 346 553 346Q609 346 649 375T694 454Q694 465 698 474T708 483Q722 483 722 452Q722 386 675 338T555 289Q514 289 468 310T388 357T308 404T224 426Q164 426 125 393T83 318Q81 289 69 289Q55 289 55 319ZM55 85Q55 126 72 159T114 210T163 238T205 248Q207 248 213 248T223 249Q262 249 296 234T393 179L443 147Q502 112 553 112Q609 112 649 141T694 220Q694 249 708 249T722 217Q722 153 675 104T555 55Q514 55 468 76T388 123T308 170T224 192Q164 192 125 159T83 84Q80 55 69 55Q55 55 55 85Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2F' d='M423 750Q432 750 438 744T444 730Q444 725 271 248T92 -240Q85 -250 75 -250Q68 -250 62 -245T56 -231Q56 -221 230 257T407 740Q411 750 423 750Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-36)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1047' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-221A' x='2103' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='2937' y='0'%3e%3c/use%3e %3cg transform='translate(3326%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-211'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='4828' y='0'%3e%3c/use%3e %3cg transform='translate(5828%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-212'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='7108' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='7775' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-221A' x='8831' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='9665' y='0'%3e%3c/use%3e %3cg transform='translate(10054%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='707' y='557'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='11231' y='0'%3e%3c/use%3e %3cg transform='translate(12231%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='1279' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='2517' y='557'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='14465' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2248' x='15133' y='0'%3e%3c/use%3e %3cg transform='translate(16189%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='1279' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='17969' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='18847' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='19348' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
When you know both FL and FR wheel speeds: Calculating longitudinal velocity ( ) using and ω_FR:
 / 2 * R = (20 %2b 22) / 2 * 0.3 = 6.3 m/s%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3C9' d='M495 384Q495 406 514 424T555 443Q574 443 589 425T604 364Q604 334 592 278T555 155T483 38T377 -11Q297 -11 267 66Q266 68 260 61Q201 -11 125 -11Q15 -11 15 139Q15 230 56 325T123 434Q135 441 147 436Q160 429 160 418Q160 406 140 379T94 306T62 208Q61 202 61 187Q61 124 85 100T143 76Q201 76 245 129L253 137V156Q258 297 317 297Q348 297 348 261Q348 243 338 213T318 158L308 135Q309 133 310 129T318 115T334 97T358 83T393 76Q456 76 501 148T546 274Q546 305 533 325T508 357T495 384Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2F' d='M423 750Q432 750 438 744T444 730Q444 725 271 248T92 -240Q85 -250 75 -250Q68 -250 62 -245T56 -231Q56 -221 230 257T407 740Q411 750 423 750Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2217' d='M229 286Q216 420 216 436Q216 454 240 464Q241 464 245 464T251 465Q263 464 273 456T283 436Q283 419 277 356T270 286L328 328Q384 369 389 372T399 375Q412 375 423 365T435 338Q435 325 425 315Q420 312 357 282T289 250L355 219L425 184Q434 175 434 161Q434 146 425 136T401 125Q393 125 383 131T328 171L270 213Q283 79 283 63Q283 53 276 44T250 35Q231 35 224 44T216 63Q216 80 222 143T229 213L171 171Q115 130 110 127Q106 124 100 124Q87 124 76 134T64 161Q64 166 64 169T67 175T72 181T81 188T94 195T113 204T138 215T170 230T210 250L74 315Q65 324 65 338Q65 353 74 363T98 374Q106 374 116 368T171 328L229 286Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2E' d='M78 60Q78 84 95 102T138 120Q162 120 180 104T199 61Q199 36 182 18T139 0T96 17T78 60Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-33' d='M127 463Q100 463 85 480T69 524Q69 579 117 622T233 665Q268 665 277 664Q351 652 390 611T430 522Q430 470 396 421T302 350L299 348Q299 347 308 345T337 336T375 315Q457 262 457 175Q457 96 395 37T238 -22Q158 -22 100 21T42 130Q42 158 60 175T105 193Q133 193 151 175T169 130Q169 119 166 110T159 94T148 82T136 74T126 70T118 67L114 66Q165 21 238 21Q293 21 321 74Q338 107 338 175V195Q338 290 274 322Q259 328 213 329L171 330L168 332Q166 335 166 348Q166 366 174 366Q202 366 232 371Q266 376 294 413T322 525V533Q322 590 287 612Q265 626 240 626Q208 626 181 615T143 592T132 580H135Q138 579 143 578T153 573T165 566T175 555T183 540T186 520Q186 498 172 481T127 463Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-36' d='M42 313Q42 476 123 571T303 666Q372 666 402 630T432 550Q432 525 418 510T379 495Q356 495 341 509T326 548Q326 592 373 601Q351 623 311 626Q240 626 194 566Q147 500 147 364L148 360Q153 366 156 373Q197 433 263 433H267Q313 433 348 414Q372 400 396 374T435 317Q456 268 456 210V192Q456 169 451 149Q440 90 387 34T253 -22Q225 -22 199 -14T143 16T92 75T56 172T42 313ZM257 397Q227 397 205 380T171 335T154 278T148 216Q148 133 160 97T198 39Q222 21 251 21Q302 21 329 59Q342 77 347 104T352 209Q352 289 347 316T329 361Q302 397 257 397Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-25)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1366' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='2422' y='0'%3e%3c/use%3e %3cg transform='translate(2811%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='4064' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='4968' y='0'%3e%3c/use%3e %3cg transform='translate(5968%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3C9' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='880' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='7221' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='7980' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='8370' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='8870' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='9593' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='10316' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='11353' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='12409' y='0'%3e%3c/use%3e %3cg transform='translate(12799%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-32'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-30' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='14022' y='0'%3e%3c/use%3e %3cg transform='translate(15023%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-32'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='500' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='16024' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='16413' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='16914' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='17636' y='0'%3e%3c/use%3e %3cg transform='translate(18359%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='19916' y='0'%3e%3c/use%3e %3cg transform='translate(20973%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='22252' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='23131' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='23631' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Lateral velocity ( ) calculation using the average steering angle:
) * L / 2 = 6.3 * tan(0.5 * (5%c2%b0 %2b 5%c2%b0)) * 2.5 / 2 = 0.68 m/s%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2217' d='M229 286Q216 420 216 436Q216 454 240 464Q241 464 245 464T251 465Q263 464 273 456T283 436Q283 419 277 356T270 286L328 328Q384 369 389 372T399 375Q412 375 423 365T435 338Q435 325 425 315Q420 312 357 282T289 250L355 219L425 184Q434 175 434 161Q434 146 425 136T401 125Q393 125 383 131T328 171L270 213Q283 79 283 63Q283 53 276 44T250 35Q231 35 224 44T216 63Q216 80 222 143T229 213L171 171Q115 130 110 127Q106 124 100 124Q87 124 76 134T64 161Q64 166 64 169T67 175T72 181T81 188T94 195T113 204T138 215T170 230T210 250L74 315Q65 324 65 338Q65 353 74 363T98 374Q106 374 116 368T171 328L229 286Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-74' d='M26 385Q19 392 19 395Q19 399 22 411T27 425Q29 430 36 430T87 431H140L159 511Q162 522 166 540T173 566T179 586T187 603T197 615T211 624T229 626Q247 625 254 615T261 596Q261 589 252 549T232 470L222 433Q222 431 272 431H323Q330 424 330 420Q330 398 317 385H210L174 240Q135 80 135 68Q135 26 162 26Q197 26 230 60T283 144Q285 150 288 151T303 153H307Q322 153 322 145Q322 142 319 133Q314 117 301 95T267 48T216 6T155 -11Q125 -11 98 4T59 56Q57 64 57 83V101L92 241Q127 382 128 383Q128 385 77 385H26Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-61' d='M33 157Q33 258 109 349T280 441Q331 441 370 392Q386 422 416 422Q429 422 439 414T449 394Q449 381 412 234T374 68Q374 43 381 35T402 26Q411 27 422 35Q443 55 463 131Q469 151 473 152Q475 153 483 153H487Q506 153 506 144Q506 138 501 117T481 63T449 13Q436 0 417 -8Q409 -10 393 -10Q359 -10 336 5T306 36L300 51Q299 52 296 50Q294 48 292 46Q233 -10 172 -10Q117 -10 75 30T33 157ZM351 328Q351 334 346 350T323 385T277 405Q242 405 210 374T160 293Q131 214 119 129Q119 126 119 118T118 106Q118 61 136 44T179 26Q217 26 254 59T298 110Q300 114 325 217T351 328Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6E' d='M21 287Q22 293 24 303T36 341T56 388T89 425T135 442Q171 442 195 424T225 390T231 369Q231 367 232 367L243 378Q304 442 382 442Q436 442 469 415T503 336T465 179T427 52Q427 26 444 26Q450 26 453 27Q482 32 505 65T540 145Q542 153 560 153Q580 153 580 145Q580 144 576 130Q568 101 554 73T508 17T439 -10Q392 -10 371 17T350 73Q350 92 386 193T423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 180T152 343Q153 348 153 366Q153 405 129 405Q91 405 66 305Q60 285 60 284Q58 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2E' d='M78 60Q78 84 95 102T138 120Q162 120 180 104T199 61Q199 36 182 18T139 0T96 17T78 60Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-35' d='M164 157Q164 133 148 117T109 101H102Q148 22 224 22Q294 22 326 82Q345 115 345 210Q345 313 318 349Q292 382 260 382H254Q176 382 136 314Q132 307 129 306T114 304Q97 304 95 310Q93 314 93 485V614Q93 664 98 664Q100 666 102 666Q103 666 123 658T178 642T253 634Q324 634 389 662Q397 666 402 666Q410 666 410 648V635Q328 538 205 538Q174 538 149 544L139 546V374Q158 388 169 396T205 412T256 420Q337 420 393 355T449 201Q449 109 385 44T229 -22Q148 -22 99 32T50 154Q50 178 61 192T84 210T107 214Q132 214 148 197T164 157Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-3B4' d='M195 609Q195 656 227 686T302 717Q319 716 351 709T407 697T433 690Q451 682 451 662Q451 644 438 628T403 612Q382 612 348 641T288 671T249 657T235 628Q235 584 334 463Q401 379 401 292Q401 169 340 80T205 -10H198Q127 -10 83 36T36 153Q36 286 151 382Q191 413 252 434Q252 435 245 449T230 481T214 521T201 566T195 609ZM112 130Q112 83 136 55T204 27Q233 27 256 51T291 111T309 178T316 232Q316 267 309 298T295 344T269 400L259 396Q215 381 183 342T137 256T118 179T112 130Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-46' d='M48 1Q31 1 31 11Q31 13 34 25Q38 41 42 43T65 46Q92 46 125 49Q139 52 144 61Q146 66 215 342T285 622Q285 629 281 629Q273 632 228 634H197Q191 640 191 642T193 659Q197 676 203 680H742Q749 676 749 669Q749 664 736 557T722 447Q720 440 702 440H690Q683 445 683 453Q683 454 686 477T689 530Q689 560 682 579T663 610T626 626T575 633T503 634H480Q398 633 393 631Q388 629 386 623Q385 622 352 492L320 363H375Q378 363 398 363T426 364T448 367T472 374T489 386Q502 398 511 419T524 457T529 475Q532 480 548 480H560Q567 475 567 470Q567 467 536 339T502 207Q500 200 482 200H470Q463 206 463 212Q463 215 468 234T473 274Q473 303 453 310T364 317H309L277 190Q245 66 245 60Q245 46 334 46H359Q365 40 365 39T363 19Q359 6 353 0H336Q295 2 185 2Q120 2 86 2T48 1Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-4C' d='M228 637Q194 637 192 641Q191 643 191 649Q191 673 202 682Q204 683 217 683Q271 680 344 680Q485 680 506 683H518Q524 677 524 674T522 656Q517 641 513 637H475Q406 636 394 628Q387 624 380 600T313 336Q297 271 279 198T252 88L243 52Q243 48 252 48T311 46H328Q360 46 379 47T428 54T478 72T522 106T564 161Q580 191 594 228T611 270Q616 273 628 273H641Q647 264 647 262T627 203T583 83T557 9Q555 4 553 3T537 0T494 -1Q483 -1 418 -1T294 0H116Q32 0 32 10Q32 17 34 24Q39 43 44 45Q48 46 59 46H65Q92 46 125 49Q139 52 144 61Q147 65 216 339T285 628Q285 635 228 637Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-52' d='M230 637Q203 637 198 638T193 649Q193 676 204 682Q206 683 378 683Q550 682 564 680Q620 672 658 652T712 606T733 563T739 529Q739 484 710 445T643 385T576 351T538 338L545 333Q612 295 612 223Q612 212 607 162T602 80V71Q602 53 603 43T614 25T640 16Q668 16 686 38T712 85Q717 99 720 102T735 105Q755 105 755 93Q755 75 731 36Q693 -21 641 -21H632Q571 -21 531 4T487 82Q487 109 502 166T517 239Q517 290 474 313Q459 320 449 321T378 323H309L277 193Q244 61 244 59Q244 55 245 54T252 50T269 48T302 46H333Q339 38 339 37T336 19Q332 6 326 0H311Q275 2 180 2Q146 2 117 2T71 2T50 1Q33 1 33 10Q33 12 36 24Q41 43 46 45Q50 46 61 46H67Q94 46 127 49Q141 52 146 61Q149 65 218 339T287 628Q287 635 230 637ZM630 554Q630 586 609 608T523 636Q521 636 500 636T462 637H440Q393 637 386 627Q385 624 352 494T319 361Q319 360 388 360Q466 361 492 367Q556 377 592 426Q608 449 619 486T630 554Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2F' d='M423 750Q432 750 438 744T444 730Q444 725 271 248T92 -240Q85 -250 75 -250Q68 -250 62 -245T56 -231Q56 -221 230 257T407 740Q411 750 423 750Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-36' d='M42 313Q42 476 123 571T303 666Q372 666 402 630T432 550Q432 525 418 510T379 495Q356 495 341 509T326 548Q326 592 373 601Q351 623 311 626Q240 626 194 566Q147 500 147 364L148 360Q153 366 156 373Q197 433 263 433H267Q313 433 348 414Q372 400 396 374T435 317Q456 268 456 210V192Q456 169 451 149Q440 90 387 34T253 -22Q225 -22 199 -14T143 16T92 75T56 172T42 313ZM257 397Q227 397 205 380T171 335T154 278T148 216Q148 133 160 97T198 39Q222 21 251 21Q302 21 329 59Q342 77 347 104T352 209Q352 289 347 316T329 361Q302 397 257 397Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-33' d='M127 463Q100 463 85 480T69 524Q69 579 117 622T233 665Q268 665 277 664Q351 652 390 611T430 522Q430 470 396 421T302 350L299 348Q299 347 308 345T337 336T375 315Q457 262 457 175Q457 96 395 37T238 -22Q158 -22 100 21T42 130Q42 158 60 175T105 193Q133 193 151 175T169 130Q169 119 166 110T159 94T148 82T136 74T126 70T118 67L114 66Q165 21 238 21Q293 21 321 74Q338 107 338 175V195Q338 290 274 322Q259 328 213 329L171 330L168 332Q166 335 166 348Q166 366 174 366Q202 366 232 371Q266 376 294 413T322 525V533Q322 590 287 612Q265 626 240 626Q208 626 181 615T143 592T132 580H135Q138 579 143 578T153 573T165 566T175 555T183 540T186 520Q186 498 172 481T127 463Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-B0' d='M147 628Q147 669 179 692T244 715Q298 715 325 689T352 629Q352 592 323 567T249 542Q202 542 175 567T147 628ZM313 628Q313 660 300 669T259 678H253Q248 678 242 678T234 679Q217 679 207 674T192 659T188 644T187 629Q187 600 198 590Q210 579 250 579H265Q279 579 288 581T305 595T313 628Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-38' d='M70 417T70 494T124 618T248 666Q319 666 374 624T429 515Q429 485 418 459T392 417T361 389T335 371T324 363L338 354Q352 344 366 334T382 323Q457 264 457 174Q457 95 399 37T249 -22Q159 -22 101 29T43 155Q43 263 172 335L154 348Q133 361 127 368Q70 417 70 494ZM286 386L292 390Q298 394 301 396T311 403T323 413T334 425T345 438T355 454T364 471T369 491T371 513Q371 556 342 586T275 624Q268 625 242 625Q201 625 165 599T128 534Q128 511 141 492T167 463T217 431Q224 426 228 424L286 386ZM250 21Q308 21 350 55T392 137Q392 154 387 169T375 194T353 216T330 234T301 253T274 270Q260 279 244 289T218 306L210 311Q204 311 181 294T133 239T107 157Q107 98 150 60T250 21Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-3)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-213'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1313' y='0'%3e%3c/use%3e %3cg transform='translate(2369%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='3679' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='4402' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-61' x='4764' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='5293' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='5894' y='0'%3e%3c/use%3e %3cg transform='translate(6283%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='7785' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='8508' y='0'%3e%3c/use%3e %3cg transform='translate(8897%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='9972' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='10875' y='0'%3e%3c/use%3e %3cg transform='translate(11876%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-3B4' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-46' x='628' y='-213'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-52' x='12950' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='13710' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='14099' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='14711' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-4C' x='15434' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='16115' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='16616' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='17394' y='0'%3e%3c/use%3e %3cg transform='translate(18450%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='19952' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-74' x='20675' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-61' x='21036' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-6E' x='21566' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='22166' y='0'%3e%3c/use%3e %3cg transform='translate(22556%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='24058' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='24780' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='25170' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-B0' x='25670' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='26393' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='27394' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-B0' x='27894' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='28395' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='28784' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2217' x='29396' y='0'%3e%3c/use%3e %3cg transform='translate(30119%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-32'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-35' x='779' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='31398' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='31899' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='32677' y='0'%3e%3c/use%3e %3cg transform='translate(33733%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-38' x='1279' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='35513' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='36392' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='36892' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Total vehicle speed:
 = %e2%88%9a(6.3%5e2 %2b 0.68%5e2) %e2%89%88 6.32 m/s%5cend%7barray%7d%3c/title%3e %3cdefs aria-hidden='true'%3e %3cpath stroke-width='1' id='E1-MJMATHI-56' d='M52 648Q52 670 65 683H76Q118 680 181 680Q299 680 320 683H330Q336 677 336 674T334 656Q329 641 325 637H304Q282 635 274 635Q245 630 242 620Q242 618 271 369T301 118L374 235Q447 352 520 471T595 594Q599 601 599 609Q599 633 555 637Q537 637 537 648Q537 649 539 661Q542 675 545 679T558 683Q560 683 570 683T604 682T668 681Q737 681 755 683H762Q769 676 769 672Q769 655 760 640Q757 637 743 637Q730 636 719 635T698 630T682 623T670 615T660 608T652 599T645 592L452 282Q272 -9 266 -16Q263 -18 259 -21L241 -22H234Q216 -22 216 -15Q213 -9 177 305Q139 623 138 626Q133 637 76 637H59Q52 642 52 648Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-3D' d='M56 347Q56 360 70 367H707Q722 359 722 347Q722 336 708 328L390 327H72Q56 332 56 347ZM56 153Q56 168 72 173H708Q722 163 722 153Q722 140 707 133H70Q56 140 56 153Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-221A' d='M95 178Q89 178 81 186T72 200T103 230T169 280T207 309Q209 311 212 311H213Q219 311 227 294T281 177Q300 134 312 108L397 -77Q398 -77 501 136T707 565T814 786Q820 800 834 800Q841 800 846 794T853 782V776L620 293L385 -193Q381 -200 366 -200Q357 -200 354 -197Q352 -195 256 15L160 225L144 214Q129 202 113 190T95 178Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-28' d='M94 250Q94 319 104 381T127 488T164 576T202 643T244 695T277 729T302 750H315H319Q333 750 333 741Q333 738 316 720T275 667T226 581T184 443T167 250T184 58T225 -81T274 -167T316 -220T333 -241Q333 -250 318 -250H315H302L274 -226Q180 -141 137 -14T94 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-32' d='M109 429Q82 429 66 447T50 491Q50 562 103 614T235 666Q326 666 387 610T449 465Q449 422 429 383T381 315T301 241Q265 210 201 149L142 93L218 92Q375 92 385 97Q392 99 409 186V189H449V186Q448 183 436 95T421 3V0H50V19V31Q50 38 56 46T86 81Q115 113 136 137Q145 147 170 174T204 211T233 244T261 278T284 308T305 340T320 369T333 401T340 431T343 464Q343 527 309 573T212 619Q179 619 154 602T119 569T109 550Q109 549 114 549Q132 549 151 535T170 489Q170 464 154 447T109 429Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-78' d='M52 289Q59 331 106 386T222 442Q257 442 286 424T329 379Q371 442 430 442Q467 442 494 420T522 361Q522 332 508 314T481 292T458 288Q439 288 427 299T415 328Q415 374 465 391Q454 404 425 404Q412 404 406 402Q368 386 350 336Q290 115 290 78Q290 50 306 38T341 26Q378 26 414 59T463 140Q466 150 469 151T485 153H489Q504 153 504 145Q504 144 502 134Q486 77 440 33T333 -11Q263 -11 227 52Q186 -10 133 -10H127Q78 -10 57 16T35 71Q35 103 54 123T99 143Q142 143 142 101Q142 81 130 66T107 46T94 41L91 40Q91 39 97 36T113 29T132 26Q168 26 194 71Q203 87 217 139T245 247T261 313Q266 340 266 352Q266 380 251 392T217 404Q177 404 142 372T93 290Q91 281 88 280T72 278H58Q52 284 52 289Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2B' d='M56 237T56 250T70 270H369V420L370 570Q380 583 389 583Q402 583 409 568V270H707Q722 262 722 250T707 230H409V-68Q401 -82 391 -82H389H387Q375 -82 369 -68V230H70Q56 237 56 250Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-79' d='M21 287Q21 301 36 335T84 406T158 442Q199 442 224 419T250 355Q248 336 247 334Q247 331 231 288T198 191T182 105Q182 62 196 45T238 27Q261 27 281 38T312 61T339 94Q339 95 344 114T358 173T377 247Q415 397 419 404Q432 431 462 431Q475 431 483 424T494 412T496 403Q496 390 447 193T391 -23Q363 -106 294 -155T156 -205Q111 -205 77 -183T43 -117Q43 -95 50 -80T69 -58T89 -48T106 -45Q150 -45 150 -87Q150 -107 138 -122T115 -142T102 -147L99 -148Q101 -153 118 -160T152 -167H160Q177 -167 186 -165Q219 -156 247 -127T290 -65T313 -9T321 21L315 17Q309 13 296 6T270 -6Q250 -11 231 -11Q185 -11 150 11T104 82Q103 89 103 113Q103 170 138 262T173 379Q173 380 173 381Q173 390 173 393T169 400T158 404H154Q131 404 112 385T82 344T65 302T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-29' d='M60 749L64 750Q69 750 74 750H86L114 726Q208 641 251 514T294 250Q294 182 284 119T261 12T224 -76T186 -143T145 -194T113 -227T90 -246Q87 -249 86 -250H74Q66 -250 63 -250T58 -247T55 -238Q56 -237 66 -225Q221 -64 221 250T66 725Q56 737 55 738Q55 746 60 749Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-36' d='M42 313Q42 476 123 571T303 666Q372 666 402 630T432 550Q432 525 418 510T379 495Q356 495 341 509T326 548Q326 592 373 601Q351 623 311 626Q240 626 194 566Q147 500 147 364L148 360Q153 366 156 373Q197 433 263 433H267Q313 433 348 414Q372 400 396 374T435 317Q456 268 456 210V192Q456 169 451 149Q440 90 387 34T253 -22Q225 -22 199 -14T143 16T92 75T56 172T42 313ZM257 397Q227 397 205 380T171 335T154 278T148 216Q148 133 160 97T198 39Q222 21 251 21Q302 21 329 59Q342 77 347 104T352 209Q352 289 347 316T329 361Q302 397 257 397Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2E' d='M78 60Q78 84 95 102T138 120Q162 120 180 104T199 61Q199 36 182 18T139 0T96 17T78 60Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-33' d='M127 463Q100 463 85 480T69 524Q69 579 117 622T233 665Q268 665 277 664Q351 652 390 611T430 522Q430 470 396 421T302 350L299 348Q299 347 308 345T337 336T375 315Q457 262 457 175Q457 96 395 37T238 -22Q158 -22 100 21T42 130Q42 158 60 175T105 193Q133 193 151 175T169 130Q169 119 166 110T159 94T148 82T136 74T126 70T118 67L114 66Q165 21 238 21Q293 21 321 74Q338 107 338 175V195Q338 290 274 322Q259 328 213 329L171 330L168 332Q166 335 166 348Q166 366 174 366Q202 366 232 371Q266 376 294 413T322 525V533Q322 590 287 612Q265 626 240 626Q208 626 181 615T143 592T132 580H135Q138 579 143 578T153 573T165 566T175 555T183 540T186 520Q186 498 172 481T127 463Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-30' d='M96 585Q152 666 249 666Q297 666 345 640T423 548Q460 465 460 320Q460 165 417 83Q397 41 362 16T301 -15T250 -22Q224 -22 198 -16T137 16T82 83Q39 165 39 320Q39 494 96 585ZM321 597Q291 629 250 629Q208 629 178 597Q153 571 145 525T137 333Q137 175 145 125T181 46Q209 16 250 16Q290 16 318 46Q347 76 354 130T362 333Q362 478 354 524T321 597Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-38' d='M70 417T70 494T124 618T248 666Q319 666 374 624T429 515Q429 485 418 459T392 417T361 389T335 371T324 363L338 354Q352 344 366 334T382 323Q457 264 457 174Q457 95 399 37T249 -22Q159 -22 101 29T43 155Q43 263 172 335L154 348Q133 361 127 368Q70 417 70 494ZM286 386L292 390Q298 394 301 396T311 403T323 413T334 425T345 438T355 454T364 471T369 491T371 513Q371 556 342 586T275 624Q268 625 242 625Q201 625 165 599T128 534Q128 511 141 492T167 463T217 431Q224 426 228 424L286 386ZM250 21Q308 21 350 55T392 137Q392 154 387 169T375 194T353 216T330 234T301 253T274 270Q260 279 244 289T218 306L210 311Q204 311 181 294T133 239T107 157Q107 98 150 60T250 21Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2248' d='M55 319Q55 360 72 393T114 444T163 472T205 482Q207 482 213 482T223 483Q262 483 296 468T393 413L443 381Q502 346 553 346Q609 346 649 375T694 454Q694 465 698 474T708 483Q722 483 722 452Q722 386 675 338T555 289Q514 289 468 310T388 357T308 404T224 426Q164 426 125 393T83 318Q81 289 69 289Q55 289 55 319ZM55 85Q55 126 72 159T114 210T163 238T205 248Q207 248 213 248T223 249Q262 249 296 234T393 179L443 147Q502 112 553 112Q609 112 649 141T694 220Q694 249 708 249T722 217Q722 153 675 104T555 55Q514 55 468 76T388 123T308 170T224 192Q164 192 125 159T83 84Q80 55 69 55Q55 55 55 85Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-6D' d='M21 287Q22 293 24 303T36 341T56 388T88 425T132 442T175 435T205 417T221 395T229 376L231 369Q231 367 232 367L243 378Q303 442 384 442Q401 442 415 440T441 433T460 423T475 411T485 398T493 385T497 373T500 364T502 357L510 367Q573 442 659 442Q713 442 746 415T780 336Q780 285 742 178T704 50Q705 36 709 31T724 26Q752 26 776 56T815 138Q818 149 821 151T837 153Q857 153 857 145Q857 144 853 130Q845 101 831 73T785 17T716 -10Q669 -10 648 17T627 73Q627 92 663 193T700 345Q700 404 656 404H651Q565 404 506 303L499 291L466 157Q433 26 428 16Q415 -11 385 -11Q372 -11 364 -4T353 8T350 18Q350 29 384 161L420 307Q423 322 423 345Q423 404 379 404H374Q288 404 229 303L222 291L189 157Q156 26 151 16Q138 -11 108 -11Q95 -11 87 -5T76 7T74 17Q74 30 112 181Q151 335 151 342Q154 357 154 369Q154 405 129 405Q107 405 92 377T69 316T57 280Q55 278 41 278H27Q21 284 21 287Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMAIN-2F' d='M423 750Q432 750 438 744T444 730Q444 725 271 248T92 -240Q85 -250 75 -250Q68 -250 62 -245T56 -231Q56 -221 230 257T407 740Q411 750 423 750Z'%3e%3c/path%3e %3cpath stroke-width='1' id='E1-MJMATHI-73' d='M131 289Q131 321 147 354T203 415T300 442Q362 442 390 415T419 355Q419 323 402 308T364 292Q351 292 340 300T328 326Q328 342 337 354T354 372T367 378Q368 378 368 379Q368 382 361 388T336 399T297 405Q249 405 227 379T204 326Q204 301 223 291T278 274T330 259Q396 230 396 163Q396 135 385 107T352 51T289 7T195 -10Q118 -10 86 19T53 87Q53 126 74 143T118 160Q133 160 146 151T160 120Q160 94 142 76T111 58Q109 57 108 57T107 55Q108 52 115 47T146 34T201 27Q237 27 263 38T301 66T318 97T323 122Q323 150 302 164T254 181T195 196T148 231Q131 256 131 289Z'%3e%3c/path%3e %3c/defs%3e %3cg stroke='currentColor' fill='currentColor' stroke-width='0' transform='matrix(1 0 0 -1 0 0)' aria-hidden='true'%3e %3cg transform='translate(167%2c0)'%3e %3cg transform='translate(-11%2c0)'%3e %3cg transform='translate(0%2c-36)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='1047' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-221A' x='2103' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='2937' y='0'%3e%3c/use%3e %3cg transform='translate(3326%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-78' x='825' y='-211'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='4828' y='0'%3e%3c/use%3e %3cg transform='translate(5828%2c0)'%3e %3cuse xlink:href='%23E1-MJMATHI-56' x='0' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1167' y='488'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMATHI-79' x='825' y='-212'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='7108' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-3D' x='7775' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-221A' x='8831' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-28' x='9665' y='0'%3e%3c/use%3e %3cg transform='translate(10054%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='1809' y='557'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-2B' x='12010' y='0'%3e%3c/use%3e %3cg transform='translate(13010%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-30'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-36' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-38' x='1279' y='0'%3e%3c/use%3e %3cuse transform='scale(0.707)' xlink:href='%23E1-MJMAIN-32' x='2517' y='557'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMAIN-29' x='15244' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2248' x='15912' y='0'%3e%3c/use%3e %3cg transform='translate(16968%2c0)'%3e %3cuse xlink:href='%23E1-MJMAIN-36'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2E' x='500' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-33' x='779' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-32' x='1279' y='0'%3e%3c/use%3e %3c/g%3e %3cuse xlink:href='%23E1-MJMATHI-6D' x='18748' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMAIN-2F' x='19626' y='0'%3e%3c/use%3e %3cuse xlink:href='%23E1-MJMATHI-73' x='20127' y='0'%3e%3c/use%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/g%3e %3c/svg%3e)
Comparing the total vehicle speeds, we can see that the estimation using only the FL wheel speed (6.02 m/s) is lower than the estimation using both FL and FR wheel speeds (6.32 m/s). The difference is due to the fact that the FL-only estimation doesn't account for the speed variation between the two front wheels, which can be caused by differences in tire pressure, road conditions, or other factors. Including both wheel speeds provides a more accurate representation of the vehicle's overall speed.
The example code
About OBD2
While OBD2 (On-Board Diagnostics 2) is a widely used standard for vehicle diagnostics and monitoring, it does have limitations when it comes to using it as a sensor fusion wheel speed resource, particularly in terms of resolution. Here are some limitations of OBD2 in this context:
Limited Resolution: As you mentioned, the OBD2 standard typically provides wheel speed information with a 1 km/h resolution. This limited resolution may not be sufficient for applications that require more precise and accurate measurements, such as advanced driver assistance systems (ADAS) or autonomous driving. In the low-velocity dynamic scenarios, it would not be accurate for the robotic to do the localization as the motion estimation system relying on wheel speed will think the robot is static when the speed is below 1km/h.
Sampling Rate: OBD2 is not designed to provide real-time data, and the wheel speed information sampling rate can be relatively slow. The standard refresh rate for OBD2 data is generally around 1-5 seconds. This delay in data acquisition and transmission may not be suitable for time-critical applications that require faster response times.
Dependence on Vehicle Systems: OBD2 relies on the functionality and accuracy of the vehicle's onboard systems, particularly the ABS. If the ABS sensors are faulty or not calibrated correctly, the wheel speed data obtained through OBD2 may not be reliable. This dependency on the vehicle's systems can limit the overall accuracy and performance of the wheel speed measurements.
Compatibility and Standardization: While OBD2 is a widely adopted standard, there can still be variations in implementation across different vehicle manufacturers and models. This lack of standardization can affect the consistency and compatibility of wheel speed data obtained through OBD2, making it challenging to rely on it as the sole source for sensor fusion applications.
We strongly recommend that our customers consider acquiring higher-resolution wheel speed signal resources or utilize the direct velocity estimation method to stream into the VRTK2 fusion engine.