How to debug NTRIP connection
In order to test the NTRIP connection, multiple tools can be used:
U-Center (recommended - Windows only)
U-Center is an application from u-blox that you can download from https://www.u-blox.com/en/product/u-center. With this tool, one can:
Connect to a Fixposition sensor and visualize the decoded NTRIP messages:
Setup the NTRIP connection on your sensor.
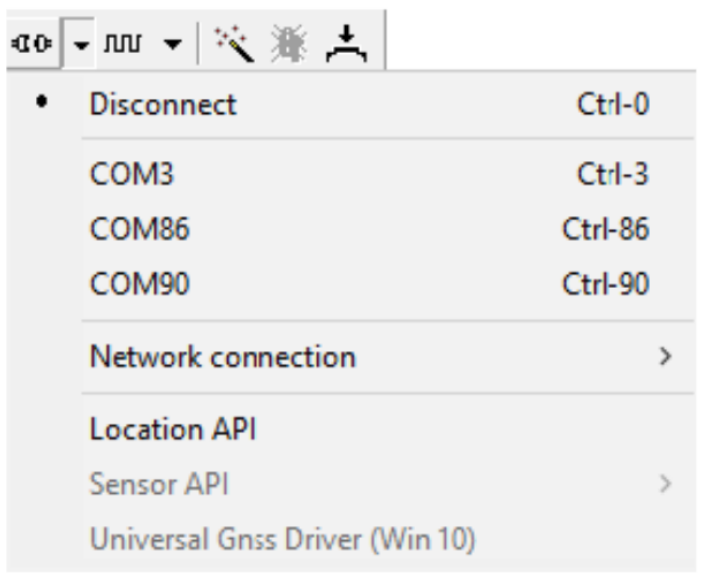
Open the drop-down menu next to the connection icon:
Network connection → New
Connect to port 23010 of the sensor:
tcp://<sensor_ip>:23010Open a packet console by clicking on the following icon:

See the decoded RTCM messages received by the sensor.
Use your computer as an NTRIP client:
Receiver → NTRIP Client
Introduce your connection credentials and setup a manual position close to the base station.
See the log messages by clicking on
NTRIP client: <caster_address>:<port>
Connect to the sensor’s NTRIP TCP port (Linux)
First, you need to install cfgtool. For that, clone the repository in your desired folder location as:
cd <folder_location>
git clone https://github.com/phkehl/ubloxcfg.gitThen, install the required libraries as:
sudo apt-get install gcc gcc-multilib perl libpath-tiny-perl libdata-float-perl mingw-w64 doxygenFinally, build the necessary tools to interpret the NTRIP messages:
make test
make cfgtoolAfterward, access the 23010 port on the sensor. You should see either the encoded (not readable) NTRIP messages or some readable error message (e.g. ‘Unauthorized access’). On a bash terminal:
nc <sensor_ip> 23010You can pipe the output of ntripclient to cfgtool in order to decode the messages:
nc <sensor_ip> 23010 | <global_path_to_cfgtool>/cfgtool-release parseSupported RTCM3 input messages:
Reference station position (rate: every 10 seconds, or more often), one of
RTCM type 1005 (Stationary RTK reference station ARP)
RTCM type 1006 (Stationary RTK reference station ARP with antenna height)
GPS observables (rate: 1 Hz), one of:
RTCM type 1074 (GPS MSM4)
RTCM type 1075 (GPS MSM5)
RTCM type 1077 (GPS MSM7)
Galileo observables (rate: 1 Hz), one of:
RTCM type 1094 (Galileo MSM4)
RTCM type 1095 (Galileo MSM5)
RTCM type 1097 (Galileo MSM7)
BeiDou observables (rate: 1 Hz), one of:
RTCM type 1124 (BeiDou MSM4)
RTCM type 1125 (BeiDou MSM5)
RTCM type 1127 (BeiDou MSM7)
GLONASS observables (rate: 1 Hz), one of:
RTCM type 1084 (GLONASS MSM4)
RTCM type 1085 (GLONASS MSM5)
RTCM type 1087 (GLONASS MSM7)
GLONASS code-phase biases (rate: every 5 seconds, or more often):
RTCM type 1230 (GLONASS code-phase biases)
The latency (age) of the data should be kept as low as possible, ideally better than 1 second.