How to send RTCM3 messages / RTK corrections via ROS
The Fixposition ROS driver can stream RTCM3 messages to the Vision-RTK2 directly when the topic ‘/rtcm’ is populated. We suggest generating messages based on the rtcm_msgs repository (https://github.com/tilk/rtcm_msgs/tree/master/msg ) to populate this topic. To achieve this, we recommend performing the following steps:
General:
Clone the ROS-based NTRIP client: https://github.com/LORD-MicroStrain/ntrip_client.git.
Clone the following NMEA message package: https://github.com/ros-drivers/nmea_msgs.
For ROS1:
Switch to the tag '1.1.0' in the NMEA message package. To do this, use the following commands:
cd nmea_msgs
git checkout 1.1.0Switch to the branch 'ros' in the NTRIP client package. To do this, use the following commands:
cd ntrip_client
git checkout rosBuild the repository using the steps detailed in Installation and usage.
For ROS2:
Switch to the branch 'ros2' in the NMEA message package. To do this, use the following commands:
cd nmea_msgs
git checkout ros2Switch to the branch 'ros2' in the NTRIP client package. To do this, use the following commands:
cd ntrip_client
git checkout ros2Build the repository using the steps detailed in Installation and usage.
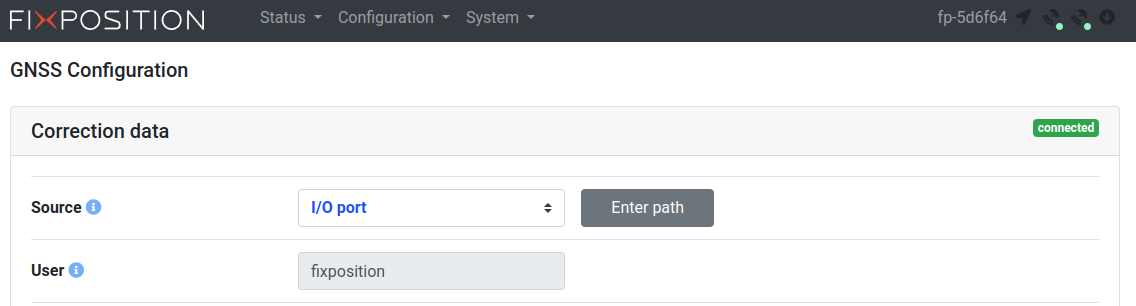
Vision-RTK2 configuration:
Head to the ‘Configuration->GNSS’ page of the Web Interface and change the Correction data source to ‘I/O port’. This will instruct the sensor to await measurements in any I/O port, such as TCP or UART(1/2).