Extract raw data for post-processing
To extract the raw data from a recording for post-processing, you can use the “Raw extraction” option in the report tab of the Customer Dashboard.
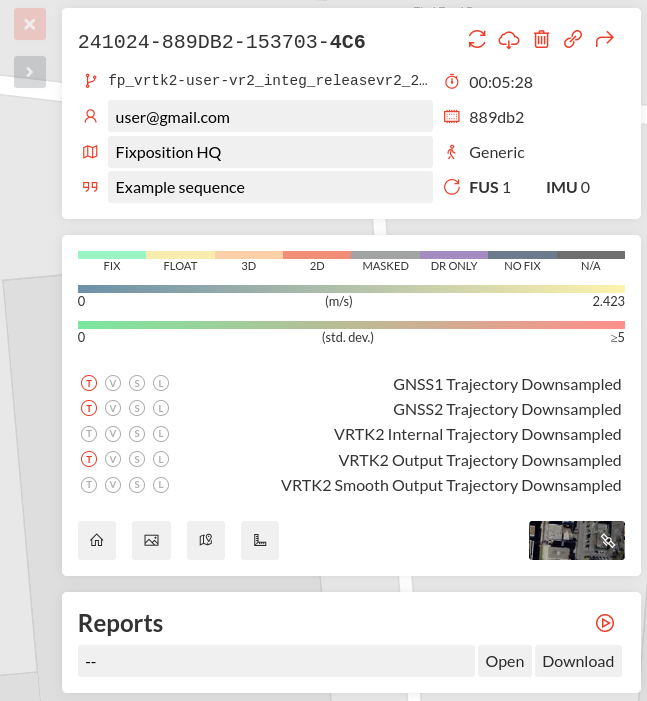
Press the “Play” button on the “Reports” field of the sequence card:
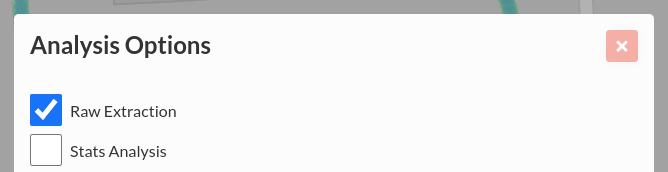
Select the “Raw Extraction” option:
Select your desired raw files from the dropdown menu:
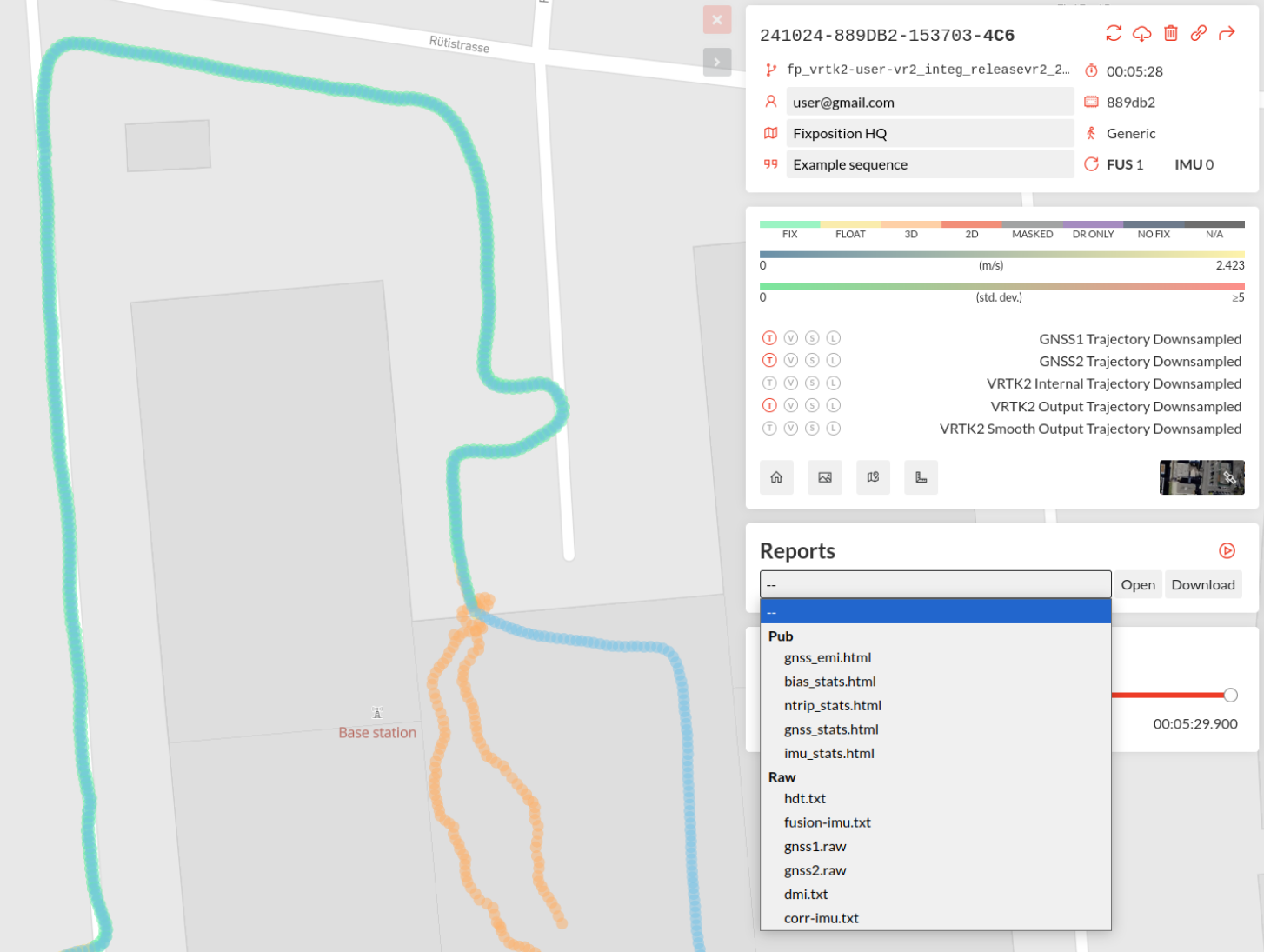
Once extraction is completed, the following files will be available:
Note that the extraction procedure might take several minutes. Please be patient.
1) corr-imu.txt
Content: The generic IMU file contains the body's time-stamped angular velocities (in rad/s) and linear accelerations (in m/s2) at ~200 Hz. These measurements are expressed in the IMU reference frame (see below), and rotations are positive clockwise in the axis direction. These values are generated from the bias-corrected raw IMU data.

Format: Uses UTF-8 encoding and presents a header followed by IMU measurement sets stored line by line.
Header:
Field | Description |
|---|---|
identifier | Message identifier. For IMU, always $qimu. |
version | File format version. Always 2. |
timeSource | IMU timestamp format. Always unix. |
Data:
Field | Description |
|---|---|
timestamp | Timestamp expressed in unix format. |
acc_x | Linear acceleration along the X axis. |
acc_y | Linear acceleration along the Y axis. |
acc_z | Linear acceleration along the Z axis. |
gyr_x | Angular velocity around the X axis. |
gyr_y | Angular velocity around the Y axis. |
gyr_z | Angular velocity around the Z axis. |
Example:
$qimu
$version:2
$timeSource:unix
1727968778.8065789;-0.7335321012100833;0.04184161091028325;-9.762919821105683;0.001358744878380131;0.0011297386049419899;-0.0019816815962985608
1727968778.8115191;-0.7215610912100834;0.04423581291028325;-9.772496629105683;0.001092428878380132;0.0011297386049419899;-0.0022479975962985607
1727968778.8164594;-0.7000132732100834;0.03465900491028325;-9.774890831105683;-0.0013044151216198702;0.0011297386049419899;-0.0014490495962985607
1727968778.8214;-0.6700857482100833;0.02987060091028325;-9.801227053105682;-0.0005054671216198695;-0.0012671053950580099;-0.0011827335962985607
1727968778.8263402;-0.6832538592100834;0.03825030791028325;-9.779679235105682;2.716487838013218e-05;-0.00233236939505801;-0.0014490495962985607
1727968778.8312805;-0.7000132732100834;0.032264802910283254;-9.776087932105684;-0.0005054671216198695;-0.00020184139505800987;-0.0009164175962985605
1727968778.836221;-0.7155755862100834;0.021490893910283256;-9.771299528105683;0.00029348087838013126;6.447460494199008e-05;-0.00038378559629856064For more information, please refer to: https://support.sbg-systems.com/sc/qd/latest/reference-manual/input-formats/generic/imu-file.
2) gnss[1,2].raw
Content: Contains the raw GNSS measurements from each GNSS receiver using the UBX format.
3) userio.raw
Content: Contains all messages that were enabled during the recording.
4) dmi.txt
Content: The generic DMI (Distance Measurement Instrument) file contains the time-stamped velocity of the body, measured from an odometry source (e.g., wheel encoder), along the vehicle’s X-axis. The velocity is positive forward and negative backward and is expressed in m/s.
Format: Uses UTF-8 encoding and presents a header followed by odometer velocities stored line by line.
Header:
Field | Description |
|---|---|
identifier | Message identifier. For DMI, always $qdmi. |
version | File format version. Always 1. |
timeSource | DMI timestamp format. Always unix. |
Data:
Field | Description |
|---|---|
timestamp | Timestamp expressed in unix format. |
velocity | Vehicle velocity along the body X axis. |
Example:
$qdmi
$version:1
$timeSource:unix
1727968869.4;1.3505195339813156
1727968869.5;1.3227281394348085
1727968869.6;1.3415307711928783
1727968869.7;1.364409187976966
1727968869.8;1.3793441893701077
1727968869.9;1.3836876323368805
1727968870.0;1.4633969402003777For more information, please refer to: https://support.sbg-systems.com/sc/qd/latest/reference-manual/input-formats/generic/dmi-file.
5) hdt.txt
Content: The generic heading file contains the time-stamped true heading measurements (in °) from the Fusion engine. These measurements are expressed in the IMU reference frame (see below), and rotations are positive clockwise in the axis direction.

Heading angle in degrees from -180° to +180° or from 0° to 360° and is positive clockwise.
Pitch angle in degrees from -90° to +90° and is positive when the front moves upward.
Format: Uses UTF-8 encoding and presents a header followed by heading measurement stored line by line.
Header:
Field | Description |
|---|---|
identifier | Message identifier. For IMU, always $qhdt. |
version | File format version. Always 1. |
timeSource | IMU timestamp format. Always unix. |
Data:
Field | Description |
|---|---|
timestamp | Timestamp expressed in unix format. |
heading | Geographic true heading in degrees from 0° to 360° or -180° to +180° |
headingStd | 1σ true heading estimated accuracy from 0° to 360°. Always 0.5°. |
pitch | Pitch angle from the primary GNSS antenna to the secondary one from -90° to +90°. Always 0°. |
pitchStd | 1σ pitch angle estimated accuracy from 0° to 180°. Always 180°. |
baseline | Distance between the primary and secondary GNSS antennas. |
Example:
$qhdt
$version:1
$timeSource:unix
1727968869.4;-48.666907286039496;0.5;0;180;0.35
1727968869.5;-47.717807475654105;0.5;0;180;0.35
1727968869.6;-46.87078727514566;0.5;0;180;0.35
1727968869.7;-46.06191158349951;0.5;0;180;0.35
1727968869.8;-45.63828654444374;0.5;0;180;0.35
1727968869.9;-45.23877982827287;0.5;0;180;0.35
1727968870.0;-44.822797500686114;0.5;0;180;0.35For more information, please refer to: https://support.sbg-systems.com/sc/qd/latest/reference-manual/input-formats/generic/heading-file.
6) extrinsics.txt
Content: The extrinsics file contains some necessary transformations to ensure the post-processing software works as expected. Currently, the following values are presented:
Transformation from IMU sensor to GNSS1.
Transformation from IMU sensor to GNSS2.
GNSS antenna baseline.
Example:
Sensor to GNSS1: [0.054, 0.177, 0.004]
Sensor to GNSS2: [0.054, -0.173, 0.004]
Antenna baseline: 0.357) fusion-imu.txt (experimental)
Content: The fusion-based IMU file contains the time-stamped angular velocities (in rad/s) and linear accelerations (in m/s2) of the body at ~100 Hz, but calculated directly from the Fusion engine instead of the raw IMU data with bias correction. These measurements are expressed in the IMU reference frame (see below), and rotations are positive clockwise in the axis direction.

Format: Uses UTF-8 encoding and presents a header followed by IMU measurement sets stored line by line.
Header:
Field | Description |
|---|---|
identifier | Message identifier. For IMU, always $qimu. |
version | File format version. Always 2. |
timeSource | IMU timestamp format. Always unix. |
Data:
Field | Description |
|---|---|
timestamp | Timestamp expressed in unix format. |
acc_x | Linear acceleration along the X axis. |
acc_y | Linear acceleration along the Y axis. |
acc_z | Linear acceleration along the Z axis. |
gyr_x | Angular velocity around the X axis. |
gyr_y | Angular velocity around the Y axis. |
gyr_z | Angular velocity around the Z axis. |
Example:
$qimu
$version:2
$timeSource:unix
1727968869.4;0.0;-0.0;-0.0;0.012339058850282381;-0.0010308782251997378;0.19907517337082786
1727968869.5;-0.27791421050471615;-0.41899560705542227;0.08651261111061205;0.03816221480718413;0.05778114565159876;0.10342444049314975
1727968869.6;0.18802649689673934;-0.12246454856263711;0.5038534048507148;0.04890945920591678;-0.12333341348514901;0.15845734563792702
1727968869.7;0.22878384056296727;-0.8315414276151177;-0.49592167517272523;0.00865405423094025;-0.010053879418046365;0.16520761222460395
1727968869.8;0.14935015636282573;0.5946505185117168;0.03824755429793614;-0.018759900536969798;-0.06986217863418268;0.04495289103279587
1727968869.9;0.043434367534366886;-0.46389756092679285;-0.10434125622285466;-0.09033610405590041;-0.10061114213900355;0.060555072683808206
1727968870.0;0.7970938388028935;0.31276555545648027;-0.009904520625092275;0.05947832931091521;-0.09131942256154339;0.011096674093947621For more information, please refer to: https://support.sbg-systems.com/sc/qd/latest/reference-manual/input-formats/generic/imu-file.